 お問い合わせ
お問い合わせ お買い物ガイド
お買い物ガイド ドローンガイド
ドローンガイド




水中ドローン・ROVでダムを3次元モデル化する水中点検技術の概要

こんにちは!セキドの佐々木です。
今回は、水中ドローン・ROVによる3次元モデルを活用して、破損箇所の位置特定をcmレベルで実現した、コンクリートダム堤体の水中点検技術を解説いたします。
この技術は、すでに国土交通省主催の技術公募に応募し、国土交通省四国地方整備局管轄の大渡ダム(高知県)で検証済みです。すぐにでも実施可能な点検・調査方法として、ぜひ最後までお読みください。
※本記事の内容は公開時(2021年2月)の情報となります。現在提供可能な内容と異なる場合がございますのでご了承ください。

水中ドローン・ROVへの期待と技術公募
水中点検・調査のうち、コンクリートダム堤体の上流水中部については、潜水士による点検の困難性や過酷性が課題となっています。近年、これらを解決する技術として、水中ドローン・ROVが注目されています。
国土交通省が管理するダムは、管理開始後30年を目途にダム総合点検が実施されています。潜水士が不足する昨今、ダム堤体を直接点検するための新しい手段として国土交通省は「水中点検ロボットを使用したコンクリートダム堤体の水中点検技術」を技術公募しました。技術に要求された要件は破損位置の特定と形状の計測です。
技術公募に応募した経緯
セキドでは2016年から水中ドローン・ROVの販売を開始し、販売だけでなく実証実験やお客様の要望に合わせたカスタマイズを行い、水中ドローン・ROVを使った様々な業務を実現してきました。その知識と経験をもとに点検専用ROVを作成し、精度の高い確かな技術として皆さまにご利用頂くために応募いたしました。
水中点検に使用した機体
BlueROV2 ダム壁面三次元点検モデル
今回使用した機体は、小型クラスのROVである「BlueROV2 プロ」をベースにしたダム点検用モデルになります。重さは約 15㎏で、特別な設備は不要で人力による運搬・投入が可能です。
 (2021年12月8日更新)BlueROV2ダム点検モデルの販売は終了しております。
(2021年12月8日更新)BlueROV2ダム点検モデルの販売は終了しております。
技術公募の結果やダム点検用ROVを紹介した記事はコチラセキドが変える水中ドローンダム堤体点検の常識とは
破損箇所の位置特定
水中では地上と異なり、位置の計測が非常に困難です。他のROVや水中ドローンでは、DVLやUSBLといった高価な水中音響測位装置を使用して位置を計測しています。しかし、それらを使用した場合でも1m単位の位置情報が取得できる程度で、cm単位の正確な位置を割り出すことは大変難しいものです。
そのため、セキドではドローンによる空中写真測量の技術を応用し、ダム堤体を3次元モデル化することで破損箇所の位置情報を取得しました。この技術は、水中の位置をcmレベルで割り出すことができるだけでなく、従来より安価な機材で実施可能です。
3次元化したダム堤体
下の画像は、実際の調査で作成したダム堤体と、破損箇所に見立てた供試体の3次元モデルです。
 ダム堤体 3Dモデル
ダム堤体 3Dモデル
 供試体 3Dモデル
供試体 3Dモデル
破損形状の計測
破損箇所の形状は、小型レーザースケーラーを使用して計測しました。レーザー幅を基準にソフト上で寸法を計測します。
レーザーの種類は、赤色レーザーと比較して光の減衰が少ないグリーンレーザーを採用することで、水中での視認性を確保しています。

水中調査の手順
検証は昨年11月下旬に行いました。この時期は浮遊土砂が少なく濁りも少ないため、水中調査に適しています。調査は1日で完了することができました。
ROVの搬入
水面近くまで階段で運搬・移動し、作業員1名でROVの搬入を行いました。小型ボートやクレーンを使用する必要はありません。軽量なため写真の様に手すりに掴まりながら移動可能です。

ROVの操縦
ROVの操縦者1名と補助者1名の計2名で作業を行います。
操縦者は画面を見ながらROVをゆっくりと操縦します。地上側にはパソコンとコントローラ、通信用のコミュニケーションBOXを設置します。

撮影時間
今回の調査では、300平方メートルあたりの撮影時間は約2時間45分でした。事前準備を前日に終えた場合、1日8時間当たりの調査可能面積は約870平方メートルとなります。
3次元モデルの作成と破損箇所の計測
3次元モデルは撮影した動画から作成しました。以下のプロセスで動画を3次元化することができます。

下の画像は、3次元モデルから作成したオルソ画像(平面な画像)を張り合わせたものです。このように調査箇所一体を1枚の写真図としてみることで、全体の位置状況が分かります。

気になる精度は?
破損の位置
3次元モデル上から計測した位置の精度は、±10㎝以内に収まりました。
供試体Aの誤差は以下の通りです。
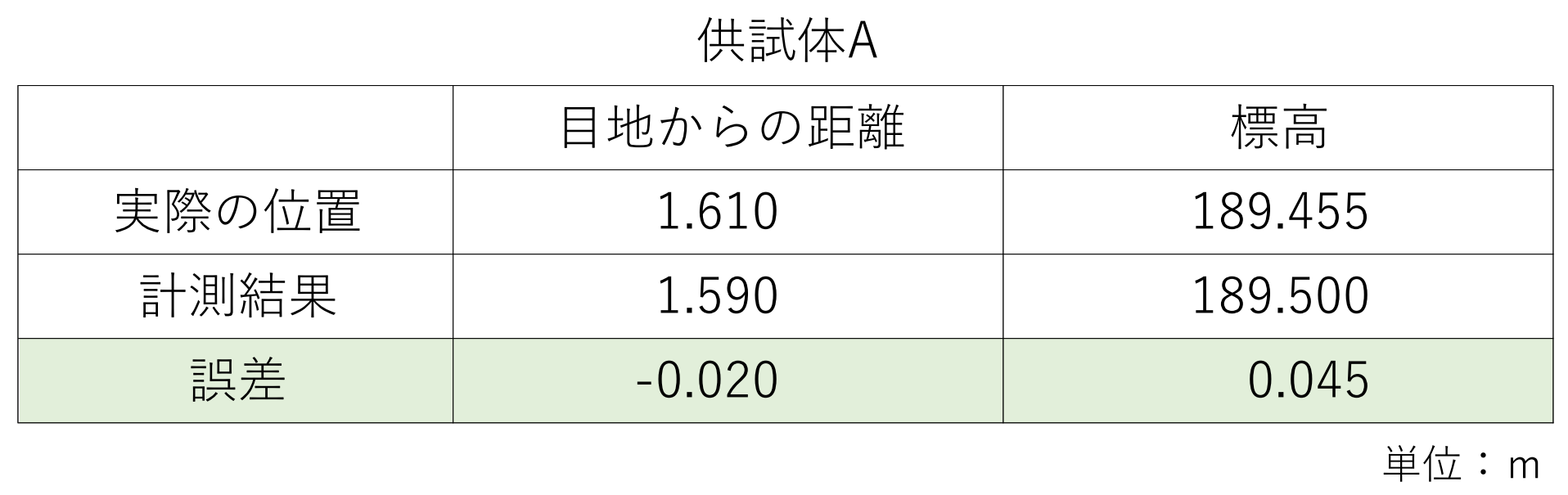 ※標高データは水圧計での計測結果です。
※標高データは水圧計での計測結果です。
破損の寸法
レーザースケーラーを活用して測定した寸法は、±20%以内の精度で計測できました。
供試体Bの誤差は以下の通りです。


まとめ
今回は3次元化するにあたり、非常に良いコンディションで撮影が可能でした。しかし、浮遊物がある場合は、ソフト上で浮遊物が認識されることで、画像のラップが上手くいかないケースが出てきます。空のドローンと違い、写真には位置情報が入らない為、画像のみでソフトウェアが目印を認識してラップしていきますが、水質が悪いとこれらの認識が混乱し、画像のラップがオートマティックにはりあわせていく事ができません。水中の3次元計測については現時点では水質に依存されるので、水質の浮遊物を取り除く画像処理技術などの到来が待ち望まれます。
今回ご紹介したROVのベースモデルはセキドにてご購入いただけます。
また、セキドでは水中ドローンについてより詳しい情報や導入事例、実績などをお伝えする無料WEBセミナーも定期的に開催しています。お申込みや最新の開催情報は一覧ページをご確認ください。具体的な用途やご検討中の課題についてのお問い合わせにも対応いたしますので、水中ドローンによる業務をご検討中の皆さまはぜひ一度ご参加ください。
(2021年12月8日更新)現在、BlueROV2ダム点検モデルの販売は終了しており、水中ドローン/ROVを使ったダム点検については、ご要望に応じて他の製品を含めたご提案を行っております。
水中ドローンの導入をご検討中の方は、経験豊富なスタッフが用途や目的合わせた機材の選定、導入から運用までワンストップでご提供いたしますので、ぜひお気軽にお問い合わせください。





















 カメラドローン
カメラドローン カメラ・スタビライザー
カメラ・スタビライザー  業務用ドローン・
業務用ドローン・ 水中ドローン(ROV)・
水中ドローン(ROV)・ RC・ロボット部品
RC・ロボット部品 講習会・イベント
講習会・イベント サポート・Q&A
サポート・Q&A ご案内
ご案内