 お問い合わせ
お問い合わせ お買い物ガイド
お買い物ガイド ドローンガイド
ドローンガイド






▲スペシャルコンテンツの更新は、公式アカウントでいち早くお知らせしています▲
体の電源がオンになっている時に、電源ボタンを5秒以上長押し、ビープ音が3回鳴ると、本体のライトが消灯し電源が強制的に落ちてオフとなります。 注意:ユーザー様と本製品の損傷を避けるために、50kgを超える力で引っ張ったり、限度を超えた早いスピードで引っ張ったりしないようお気をつけ下 […]
電源ボタンの周囲のライトで判別します。4段階に分け本体のライトが点灯します。 ライトが4つ点灯している時のバッテリー残量は75〜100%、ライトが3つ点灯している時は残量50〜75%、ライトが2つ点灯している時は残量25〜50%、ライトが1つ点灯している時は残量25%以下となりま […]
以下の理由が考えられます。 1.ロープを早く引き過ぎている場合 PUMPのロープを早く引きすぎて操作し定格回転数を超えると、PUMP は保護状態になり、具体的にはロープが引き込めなくなり、電源インジケータが全点滅します。(FITNESS PUMP APP上には「PUMPを早く引き […]
以下の動画をご確認ください。 https://video.wixstatic.com/video/d075b7_5c4fec3c2dec4160a3a633912587e3bc/720p/mp4/file.mp4 ※付属のDクリップでエクササイズバーの両端を接続し、ローイングハン […]
以下の動画をご確認ください。 https://video.wixstatic.com/video/d075b7_e3dbc23bbde94d05a588f50c3adca0d6/1080p/mp4/file.mp4 ※「ロープの初期長さを調整」機能を利用する事で、一人でも安全にト […]
通常では、機内持ち込みの範囲内です。 しかしながら、航空会社によって規定は異なりますので、ユーザー様にて事前にご確認ください。 ※当記事の無断での複製、改編、転載、二次利用などは一切禁じます。 ※記載内容は公開時点での仕様に基づいています。バージョンアップなどにより記載内容と異な […]
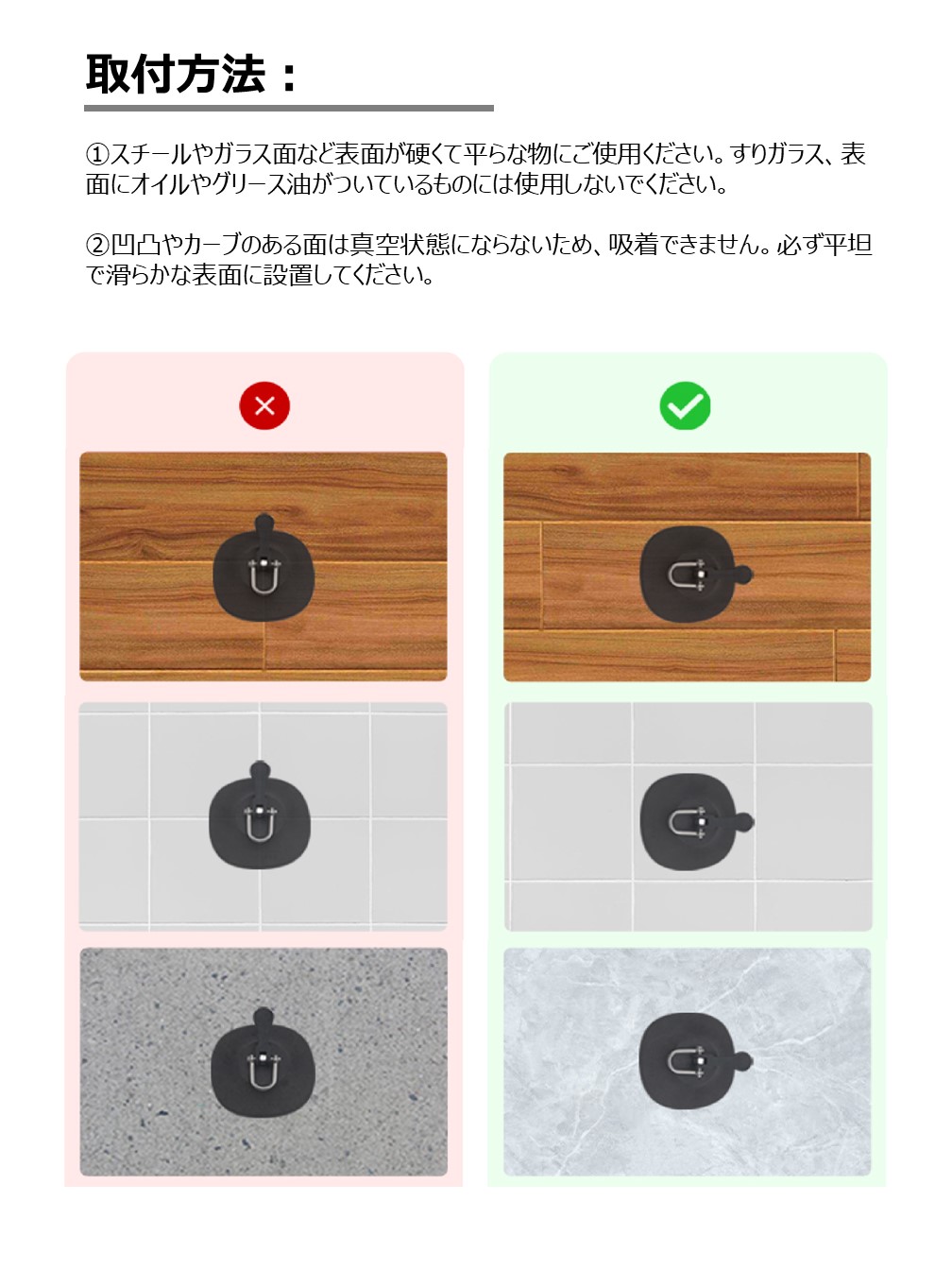
以下の動画をご確認ください。 https://video.wixstatic.com/video/d075b7_8d85a6648b5e4060a6bd5a20a9e6c56a/720p/mp4/file.mp4 ※サクションカップはロッキングストリップと一緒に使用する必要があり […]
以下の動画をご確認ください。 https://video.wixstatic.com/video/d075b7_20945c4a44bb4310b117f3a1152a65c5/1080p/mp4/file.mp4 ※アンクルストラップは固定物に取り付けることができます。(例:柱 […]
以下の動画をご確認ください。 https://video.wixstatic.com/video/d075b7_8e51a6bb107a4c0b93440560563c96cf/1080p/mp4/file.mp4 なお、5分間操作しないと、PUMPは自動的にシャットダウンします […]
アプリとの接続方法・ファームウェア更新方法・フリートレーニングについては以下の動画をご確認ください。 https://video.wixstatic.com/video/d075b7_ff64b562352a4d99b683e79dada35609/1080p/mp4/file. […]
露出オーバー警告の設定がONとなっていますので、意図しない場合にはOFFにしてください。 変更設定についてはアプリやOS毎に場所は表示の日本語が違うのでご注意ください。 例1(DJI FLY): 「カメラ」設定内の「露出過多警告」 例2(DJI GO 4): 「カメラ詳細設定(シ […]
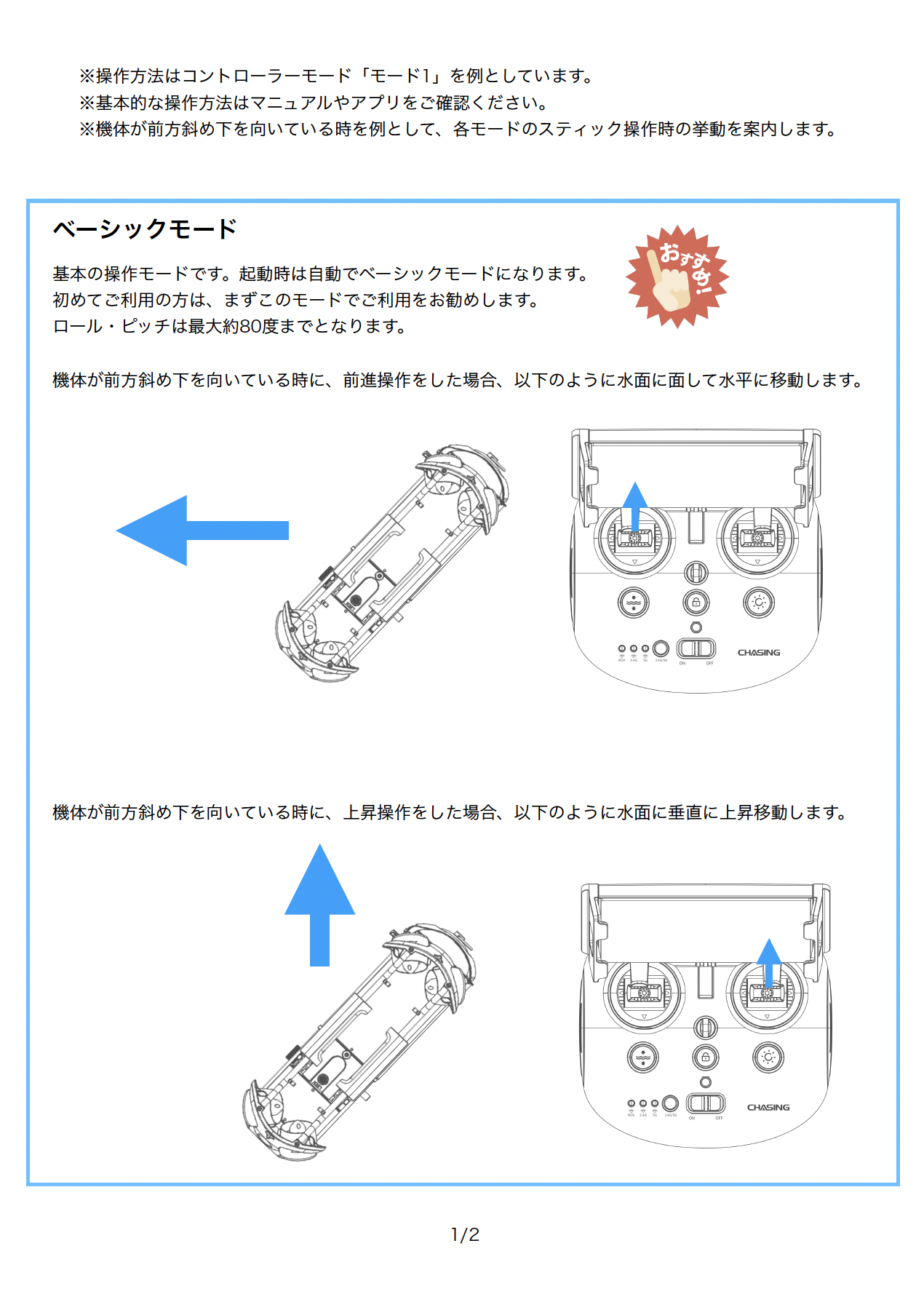
CHASING M2 シリーズには操作モードが2種類あります。 ベーシックモード アドバンスモード 各モードについては以下をご確認ください。 ※当記事の無断での複製、改編、転載、二次利用などは一切禁じます。 ※記載内容は公開時点での仕様に基づいています。バージョンアップなどにより […]
モーターが固着して回転しなくなった場合、モーターの錆や塩害等による劣化によることが要因となります。 モーター固着の主な原因は、ご利用による劣化や、ご利用後のメンテナンス不足・保管時の環境によるものとなります。 水中の細かい砂やチリ、プランクトンなどが付着した状態での保管や、乾燥し […]
充電エラーが発生する場合には、下記の点についてご確認ください。 1. バッテリーステーションのファームウェアが最新である事 ※送信機を最新バージョンにアップデートしバッテリーステーション有線接続を行ってください 2. 別の充電口に差し込み充電可能である事 3. バッテリー及びバッ […]
遠隔モニター拡張プレートのSDIは音声の出力はできません。 ※DJI映像トランスミッターのSDIは音声の出力は可能です。 ※DJI社アフターサポート規定に準拠致しております。DJI社及び弊社の判断により規約を変更させて頂く場合があります。 ※当記事の無断での複製、改 […]
「最大ステアリング角度」はハンドル調整角度の範囲に関する設定値です。 オプション角度センサーを使用しない場合に調整できます。 設定 > パラメータ設定 > 角度センサーキャリブレーション > 角度センサーなし と選択し調整します。 初期値 設定範囲 数値を小さくすると 数値を大き […]
「速度ループ比例係数(P)」はハンドルの回転力に関する設定値です。 設定 > パラメータ設定 > モーター調整 と選択し調整します。 初期値 設定範囲 数値を小さくすると 数値を大きくすると 速度ループ比例係数(P) 25 20~40程度 (5ずつ調整) モーターの反応が遅くなり […]
バッテリーは乾電池などに比べてパワーや容量が大きい分、取扱いを誤る と電池の発熱、発火、破裂などの可能性があり、重大な事故の原因となる場合があります。 バッテリー内蔵型、バッテリー脱着型にかかわらず、以下の点にご注意いただき正しくご利用・保管ください。 1.(バッテリー脱着型の場 […]
「ベースライン倍数」「定常ベースライン倍数」はハンドル調整の機敏さに関する設定値です。 ※バージョン2.1.7.47以前の場合。 設定 > パラメータ設定 > 係数調整 と選択し調整します。 初期値 設定範囲 数値を小さくすると 数値を大きくすると ベースライン倍数 1.0 0~ […]
2022年1月現在、弊社で販売している水中ドローンについて、法律上必要な資格や免許はございません。 また、現時点では水中ドローンに関する法律や規制は制定されていませんが、ご利用する場所によっては、港や海の保安を目的に制定された「港則法」や「海上交通安全法」に関わってくると考えられ […]












 カメラドローン
カメラドローン カメラ・スタビライザー
カメラ・スタビライザー  業務用ドローン・
業務用ドローン・ 水中ドローン(ROV)・
水中ドローン(ROV)・ RC・ロボット部品
RC・ロボット部品 講習会・イベント
講習会・イベント サポート・Q&A
サポート・Q&A ご案内
ご案内