 お問い合わせ
お問い合わせ お買い物ガイド
お買い物ガイド ドローンガイド
ドローンガイド




Matrice 300 RTK での立面飛行ミッションプラン作成方法とは?

こんにちは、セキドの北村です。
今回は、業務用ドローンの新スタンダード DJI Matrice 300 RTK を使用した、立面飛行のミッションプラン作成方法をご紹介いたします。自動航行の場合、基本的には平面飛行のみとなりますが、スマート送信機に搭載されたウェイポイント機能を使用することで、立面飛行が可能となります。
平面飛行のミッションプラン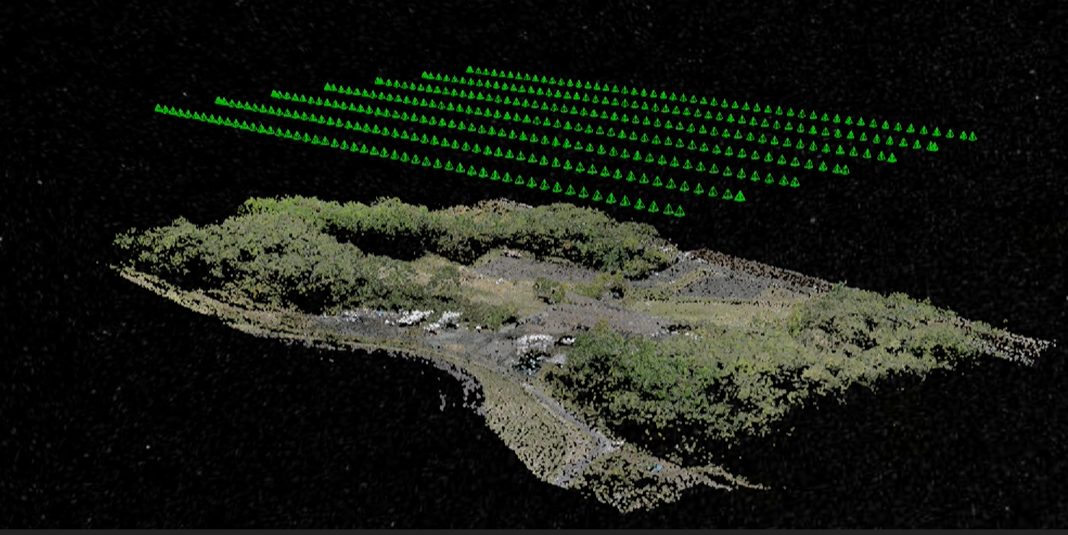
ウェイポイント機能を使用した立面飛行のミッションプラン[※1]
この方法を使用することで、今まで手動で行っていた立面の壁面調査なども自動化でき、時間短縮や撮影漏れなどが改善され、作業の効率化を図ることが可能となります。
※1 DJIが提供している記事内の画像を使用しております。本記事と同じミッション方法を使用して一部の作業を実施した、実証実験の詳しい内容はこちらの動画をご確認ください。
DJI Zenmuse P1 を活用した遊戯施設点検の共同検証実験(観覧車)[Youtube]
立面飛行ミッションの作成
立面飛行のミッションプランを作成するにはウェイポイント機能を使用します。また細かな数値の変更やポイントの修正などを実施するため、マウス及びキーボードを用意することをお勧めいたします。マウス及びキーボードはUSB接続タイプのものが使用可能です。

ミッションの作成手順
ミッションの作成方法としては、立面飛行を実施する箇所に2点のポイント位置(緯度、経度)を決め、その2点間のポイント上に高さのみを変更したウェイポイントを重ねていくことで実現します。作成方法の流れは以下となります。
※ 設定の手順に明確な決まりはありません。最終的な設定内容に誤りがなければ問題はありませんので、設定しやすい流れで実施してください。こちらで紹介する方法はあくまでも一例となります。
1. スマート送信機とマウス及びキーボードを接続し、電源を入れます。
2. ミッション飛行をクリックします。

3. ルート作成をクリックします。

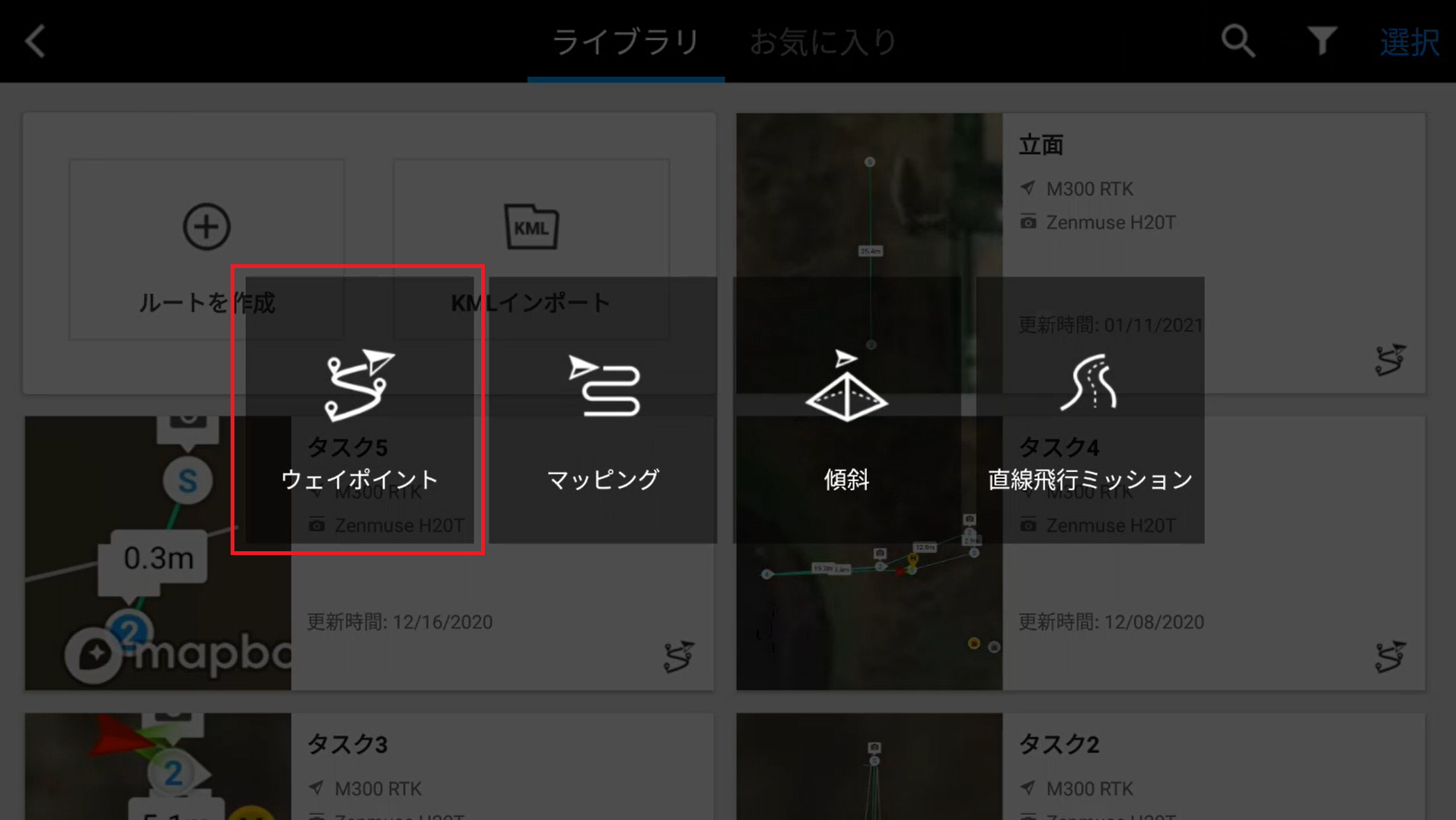
4. ミッション選択画面が表示されるので「ウェイポイント」をクリックします。
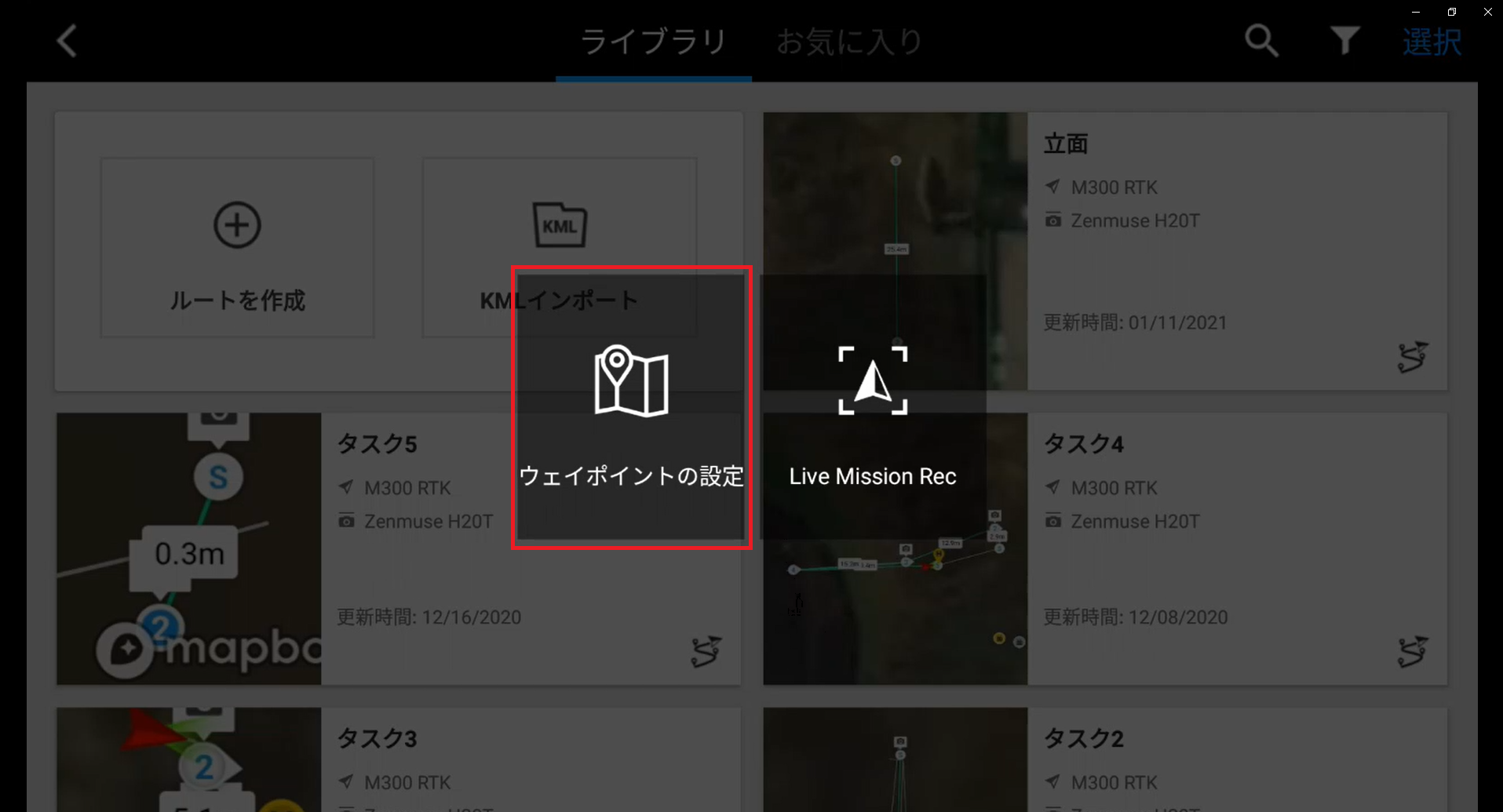
5. ウェイポイントの選択画面が表示されるので、「ウェイポイントの設定」をクリックします。
6. タスク名を入力し、「ドローンを選択」から「Matrice 300 RTK」を選択します。

7. 立面飛行を実施する箇所2点のポイントを決めます。今回はルートと対象物の距離は20mとしております。

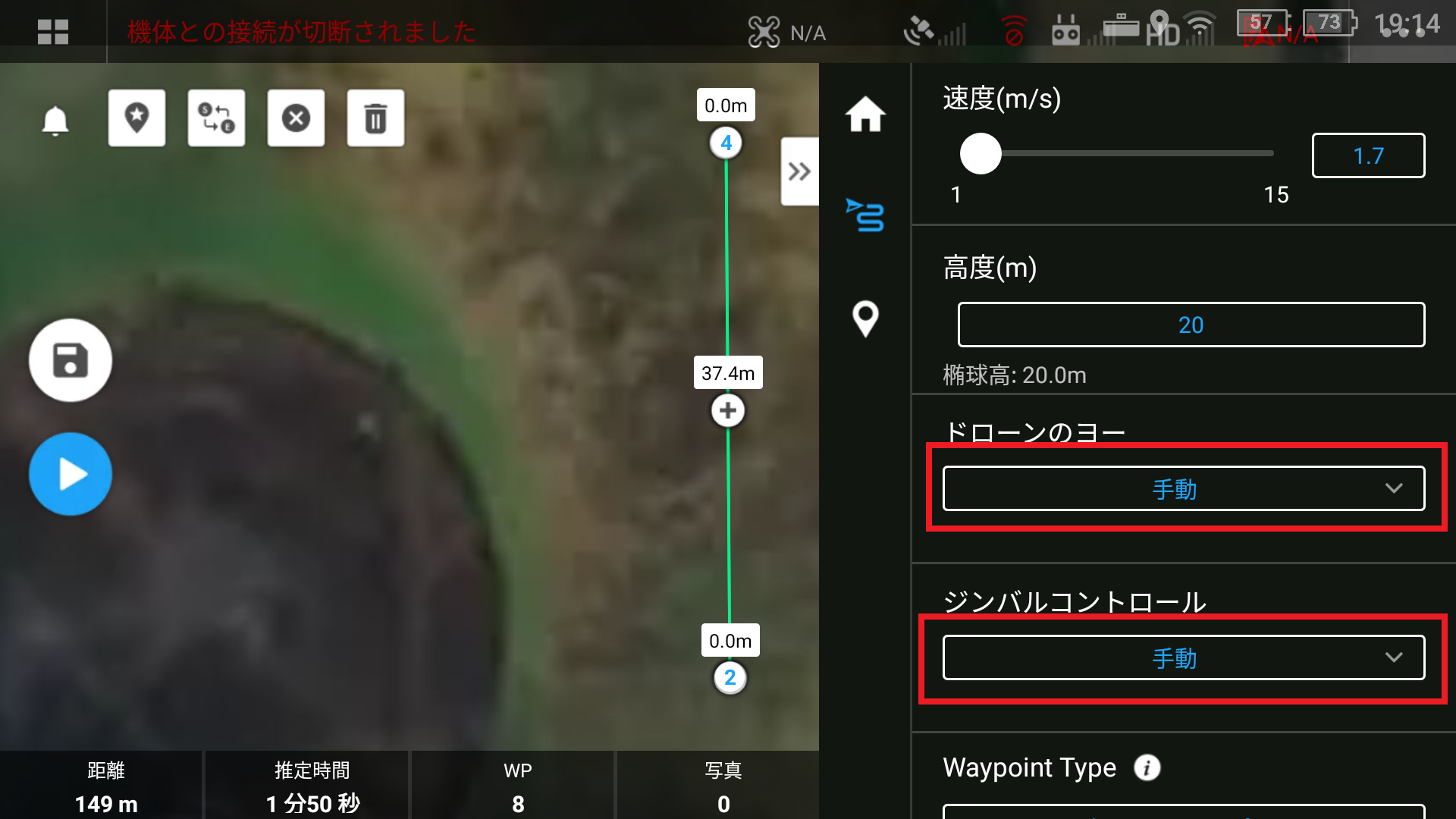
8. ルートの設定画面上でドローンのヨー及びジンバルコントロールで「手動」を選択します。この設定により自動飛行ミッション中に機体の向き及びジンバルの操作が可能となります。
ルート設定画面での設定は、ミッション上のすべてのポイントに設定が反映され、各ポイントごとで設定したい場合はポイント設定で「ルートをフォロー」のチェックを外せば個別に設定が可能となります。
9. 対象物の高さ及びサイドラップ率に合わせてルートの往復分のポイントを生成します。追加で作成したポイントの位置は後で修正するため適当で問題ございません。今回は4往復分として作成しております。

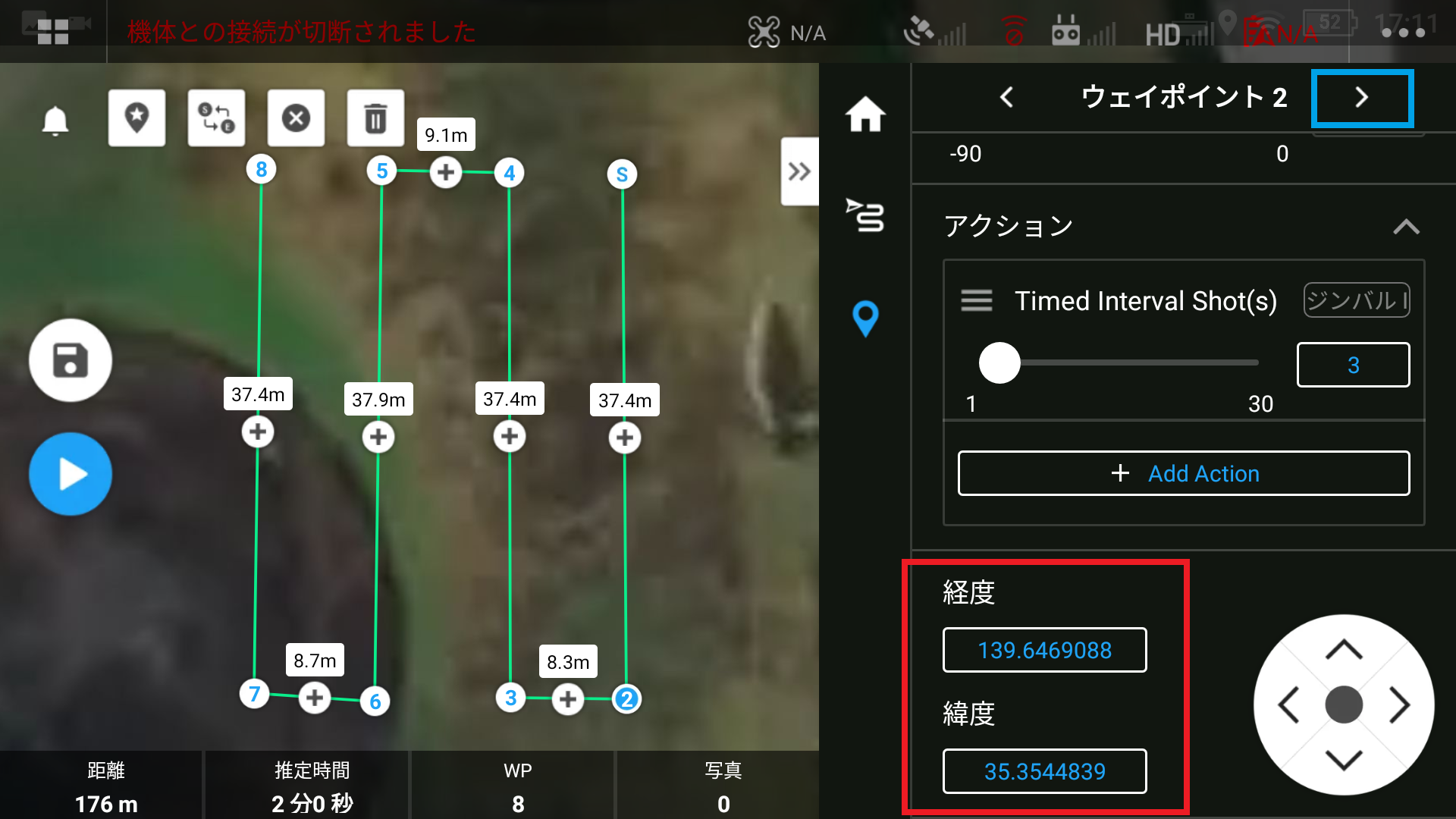
10. 追加したポイント(点③~点⑧)の位置を最初に設定した2点(点Sと点②)のポイント位置に修正します。ウェイポイントの設定画面を開き、点②の緯度経度の値を確認します。確認後に青枠部分の「>」をクリックし、修正するウェイポイント選択します。
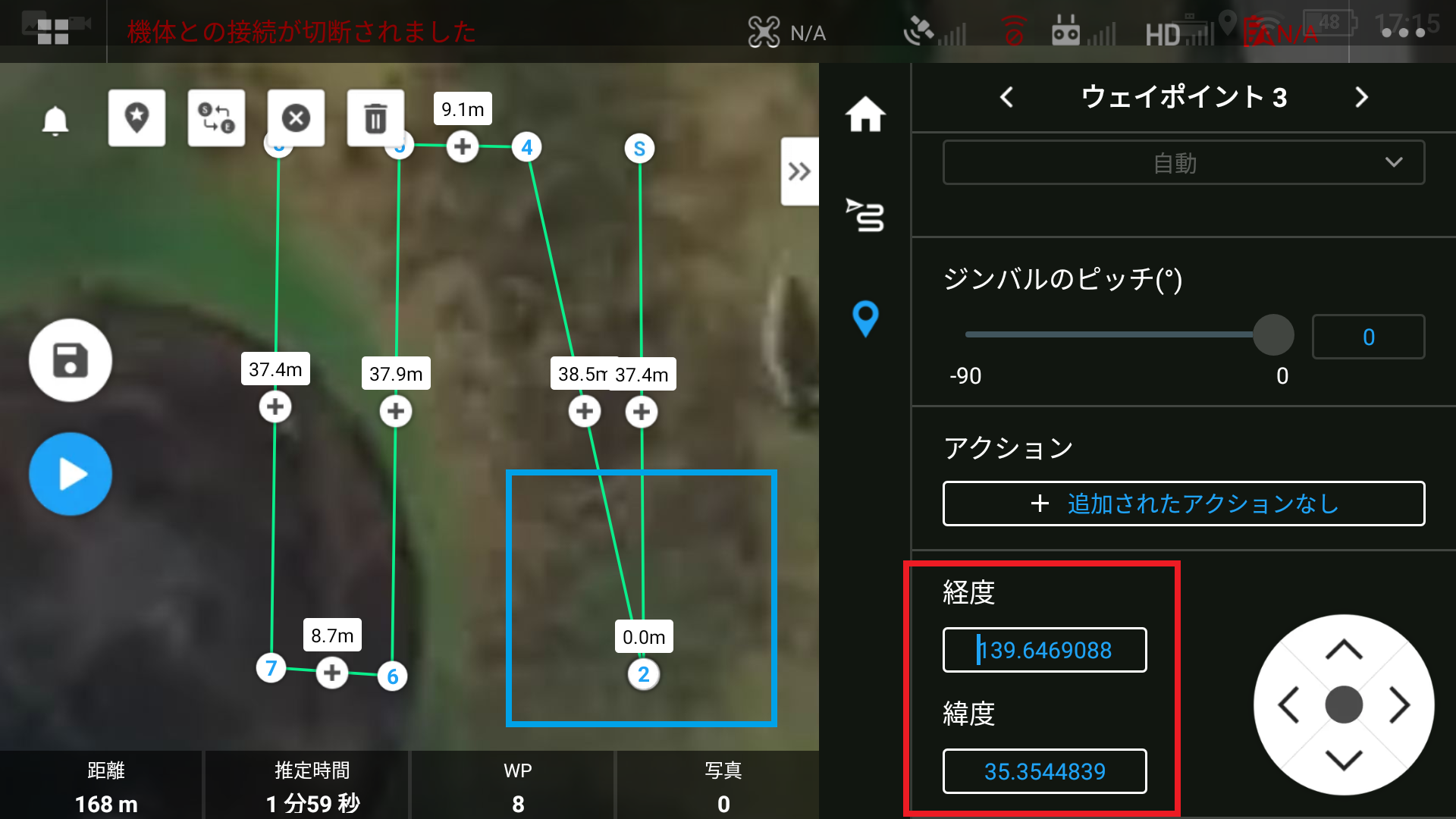
11. ポイント③の設定画面を表示したら、先ほど確認したポイント②の緯度経度と同じ値に修正します。変更が実施されると下のように点③が点②に重なります。
すべてのポイントの位置情報を変更すると下のようになります。
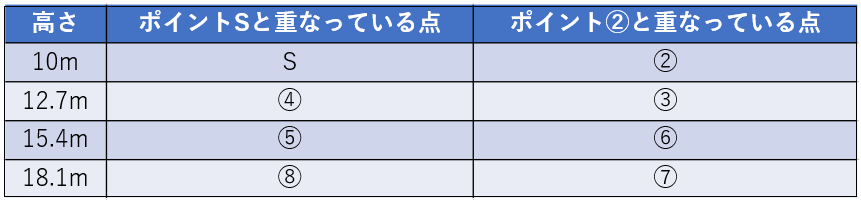
今回の場合は以下のようにポイントがまとまります。
ポイントS:ポイント④、⑤、⑧
ポイント②:ポイント③、⑥、⑦
12. 次に高さ及び速度を決めていきます。ウェイポイントミッションの場合は写真の重複率は自動では設定できない仕様のため、高さでサイドラップ率、速度及びシャッター間隔でオーバーラップ率を調整します。
今回はサイドラップ率、オーバーラップ率はそれぞれ80%として設定していきます。DJI Zenmuse P1 では対象物が20mの場合、GSDは0.25(cm/pixel)となります。そのため写真内に写る大きさは縦13.65m、横20.45mとなります。80%の重複率とする場合、1回のシャッター間隔では縦2.73m、横4.0mの移動が可能となります。
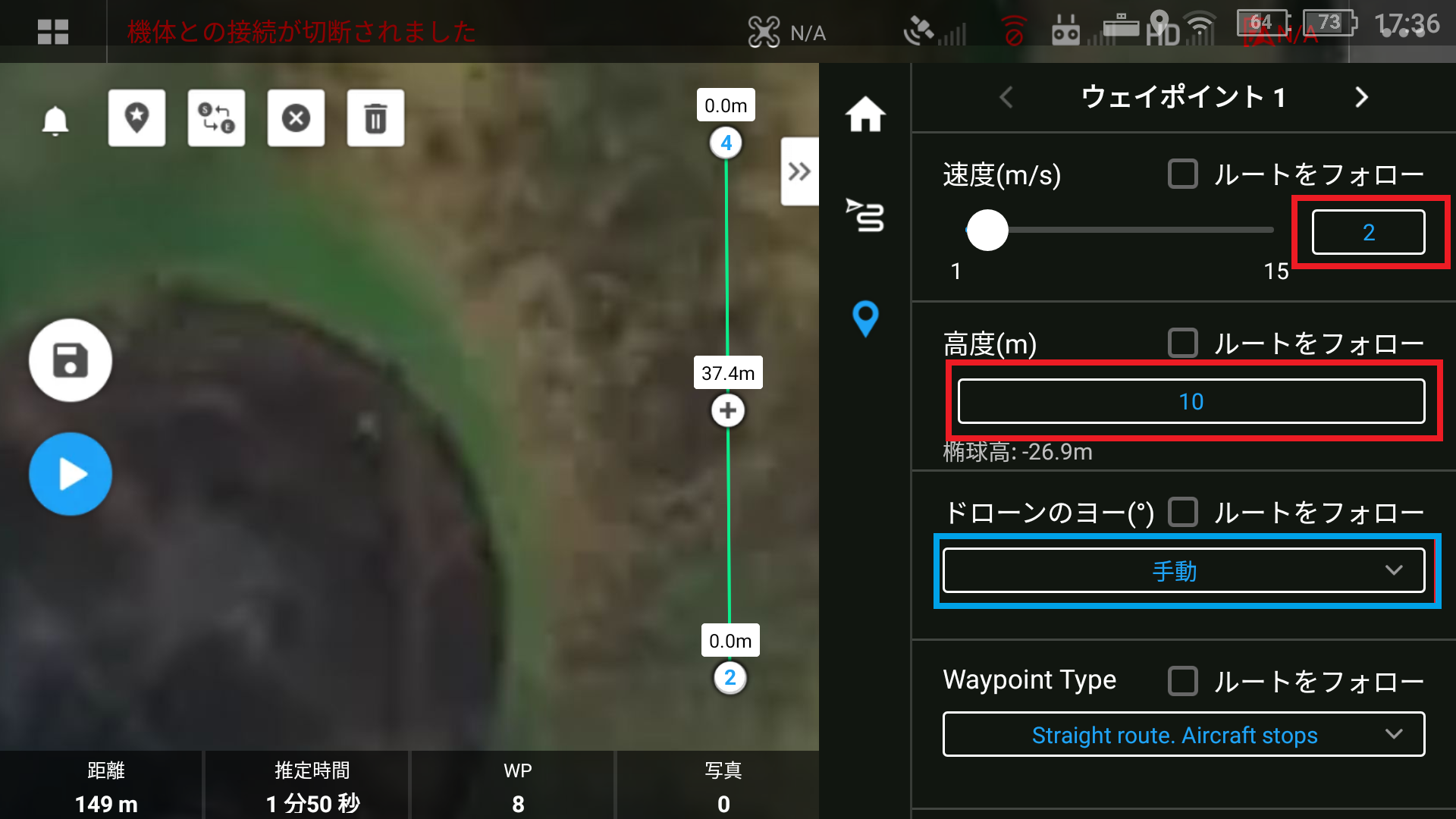
上記のことから、今回は以下の値で設定いたしました。
各ポイントの高さの差:2.73m
※ 各高さは下の図を確認ください。初期の高さは10mとしております。
速度:2m/s
シャッター間隔:2秒毎
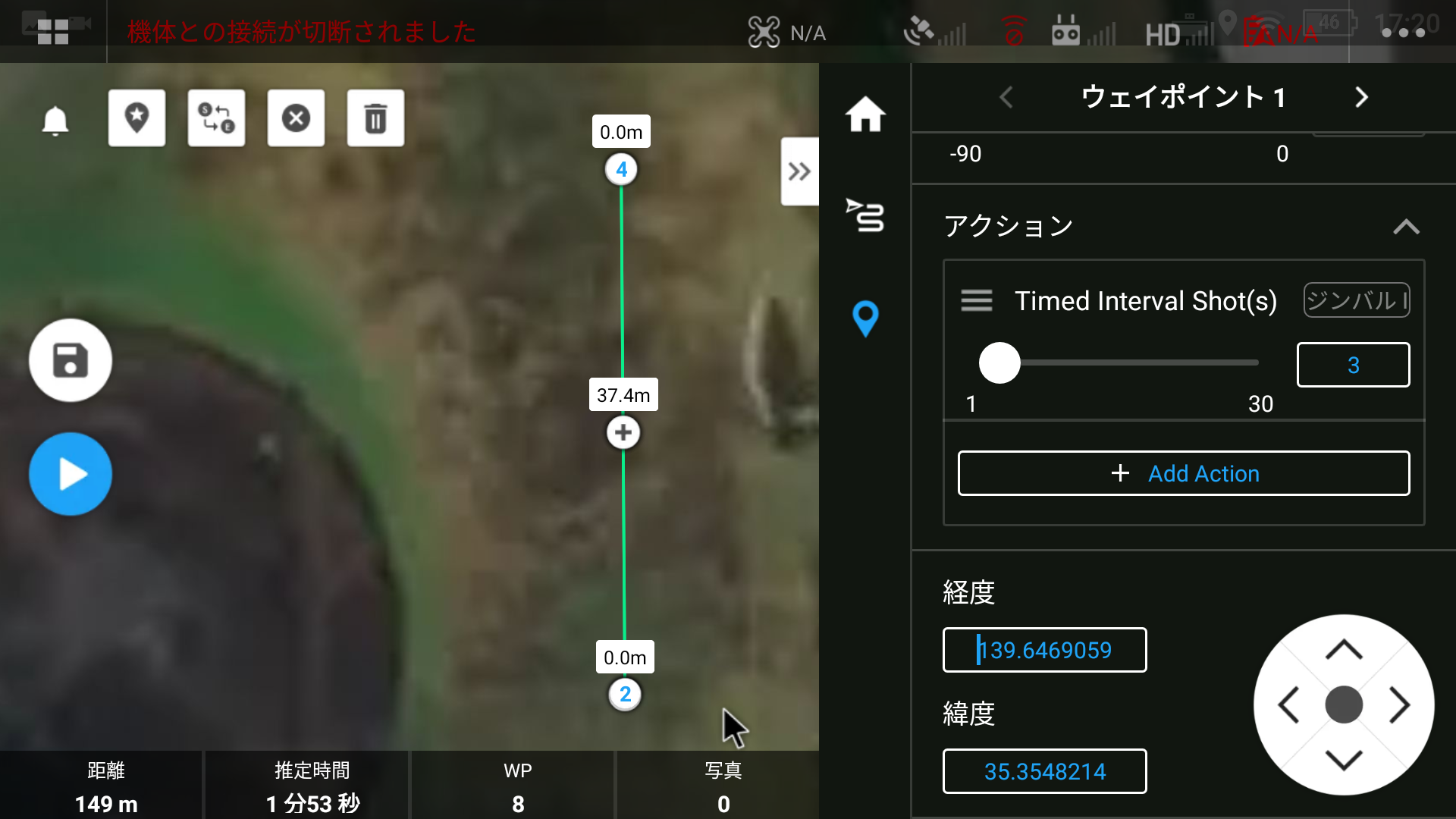
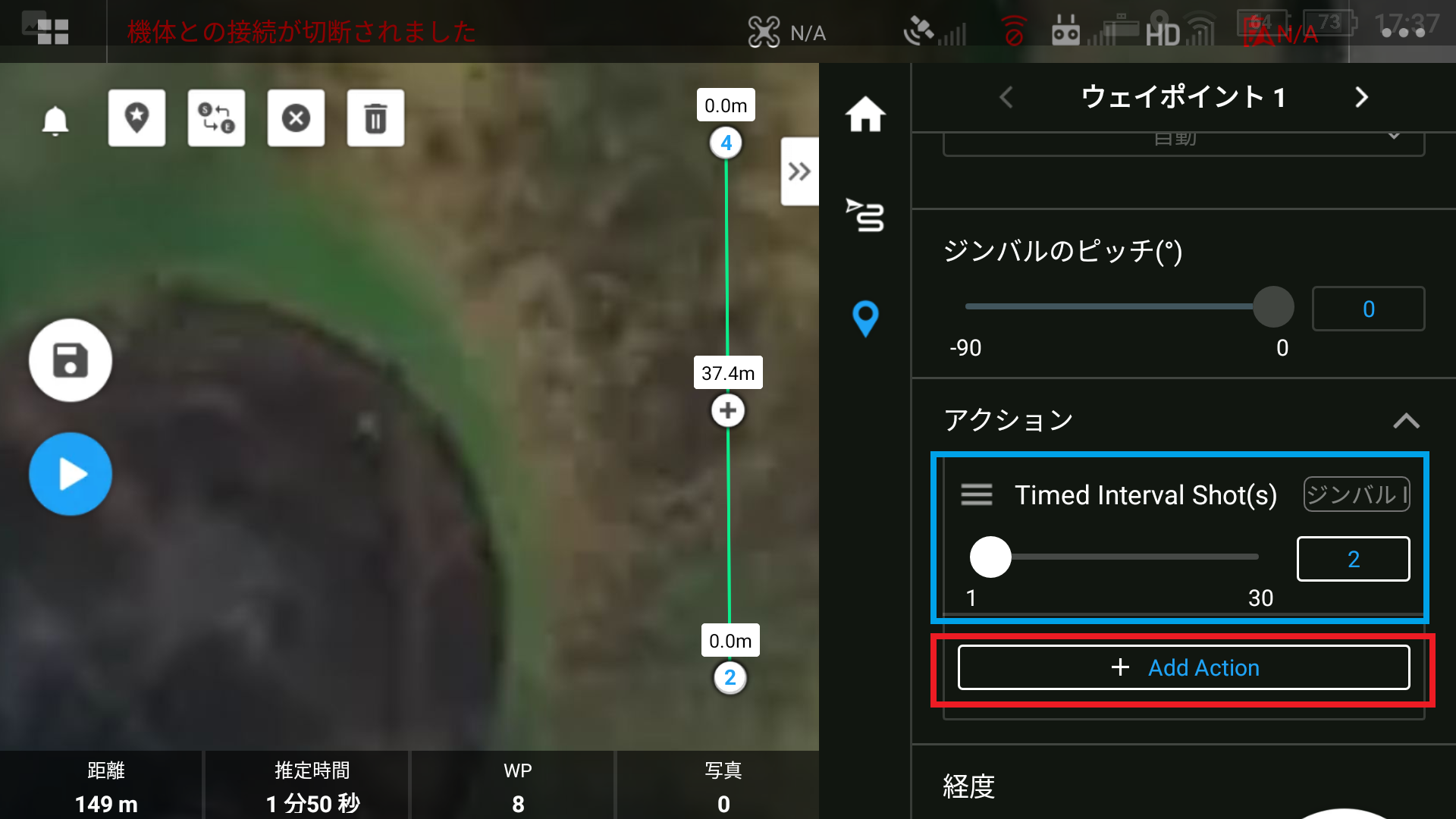
13. 先ほど求めた値を各ポイントに入力します。またドローンのヨーを手動に設定します。
次に「Add Action」とタップし「Timed Interval Shot」を選択します。選択するとアクション内に選択した項目が追加されます。追加後に数値を「2」に変更します。この変更によって2秒間に1回シャッターが切られる設定になります。
※「Timed Interval Shot」の設定はすべてのポイントごとに入力が必要となります。
14. 最後に、設定した内容に間違いがないか再度確認してください。細かな設定などは実施する環境に依存しますので、必要に応じてで設定変更をお願いいたします。
また、設定や成果に問題ないか確認するため、必ず一度は事前に広い箇所で、作成したミッションでフライトしておくことをお勧めいたします。
ミッション実行時の注意点
立面飛行のミッション作成方法を説明させて頂きましたが、今回のミッションでは実行時に1点だけ手動で実施しないといけない作業がございます。
それは「機体がスタート地点に到着し、ミッションが開始された際に機体の向きを変更する」という作業です。
ウェイポイントの自動航行では、標準的に機体の向きはルートの進行方向になります。そのため、向きを撮影対象に変更する必要があります。ルートの設定画面で「ドローンのヨー」を「手動」に設定したのは、機体の向きを対象物に向けて変更するためです。
立面飛行のミッションプラン作成方法は以上となります。
今回紹介させて頂いた方法をお試し頂き、作業の効率化を図って頂ければと思います。
測量を想定したデモを行う実演会開催
今回紹介した DJI Zenmuse P1 と Matrice 300 RTK について、実機を使って測量や構造物点検の現場を想定したデモを行う無料実演会を定期的に開催しております。横浜市金沢区のセキド DJI 横浜ドローントレーニングセンターで開催する実演会では、撮影データを持ち帰ることもできる、導入検討中の事業者様に最適なイベントになっております。
また、産業用ドローンの性能や導入事例を紹介する無料WEBセミナーも開催しておりますので、是非お気軽にご参加ください。

購入相談をご希望のお客様は、お気軽に下記の問い合わせフォームよりご依頼くださいませ。

DJI Matrice 300 RTK 資料請求・見積もりフォーム

DJI Zenmuse P1(M300RTK)資料請求・見積もりフォーム
お電話でのお問い合わせ、ドローン導入についてのご相談もお待ちしております。





















 カメラドローン
カメラドローン カメラ・スタビライザー
カメラ・スタビライザー  業務用ドローン・
業務用ドローン・ 水中ドローン(ROV)・
水中ドローン(ROV)・ RC・ロボット部品
RC・ロボット部品 講習会・イベント
講習会・イベント サポート・Q&A
サポート・Q&A ご案内
ご案内