 お問い合わせ
お問い合わせ お買い物ガイド
お買い物ガイド ドローンガイド
ドローンガイド






▲スペシャルコンテンツの更新は、公式アカウントでいち早くお知らせしています▲
過度な砂や泥などが滞留している環境でのご利用は著しい劣化・破損の原因となります。そのような環境でのご利用後は、特に念入りにクリーニングメンテナンスの実施をお願いいたします。 海水・淡水での利用(目安として、河川や海のpH値と同様のpH6〜8前後の範囲内)を前提としておりますので、 […]
コントローラーの写真撮影ボタンを押して撮影する場合は、写真撮影ボタンしっかり押し込むイメージで操作をお願いいたします。 一瞬軽く押しただけですと撮影されない仕様となっております。 なお、撮影が成功すると、画面が一瞬暗くなります。 写真撮影操作はFIFISH APPからも可能ですの […]
正常です。 こちらは電源の切り忘れを防止するアラームとなります。 長時間、陸上での起動をして放置することは望ましくありませんのでご注意ください。 送信機のロック解除ボタンを押して、スクリューを6個全て回転させることでアラームは鳴り止みます。 (地上でのモーター動作は5秒以内にとど […]

Aモード(姿勢維持モード)においては、FIFISH APPのパイロット画面の3D姿勢をダブルタップすることで、機体が水平状態に戻ります。 Sモード(スポーツモード)については、手動操作のため、手動操作で機体を水平状態に戻していただくか、Aモードに切り替えることで水平状態に戻す必要 […]

FIFISH V6シリーズには操作モードがあります。 A,S,Cの3種類のモードで構成されております。 Aモード=姿勢維持モード Sモード=スポーツモード Cモード=組み合わせモード(VRモード) 各モードの変更は、送信機向かって左上のスイッチで切り替えます。 また、深度維持ボタ […]
DJI社の製品は過去発売した製品への修理・アクセサリーの供給サポートについて、 下記の通り、公式サイトで案内をしています。 →旧型製品のサポート終了に関するお知らせ 「電子製品は技術の発展と使用需要の変化の影響を受け、 各世代の製品には対応する製品ライフサイクルがあります。 より […]
【製品】 DJI Mavic 3Mを購入および使用できる国/地域を教えてください。 DJI Mavic 3Mは、中国本土、北米、その他一部の地域でご利用いただけます。使用方法と入手方法に関する具体的な情報については、DJI公式サイト ( https://ag.dji.com/ma […]

劣化や故障をして、バッテリーを廃棄したい場合、自治体・改修業者に回収してもらう必要があります。 CHASINGのバッテリーは、金属製の耐水ボックスに覆われております。そのため、廃棄の際は内部のバッテリーを取り出す必要があります。 以下に手順をご案内いたします。 ※安全に配慮して、 […]
Q1.使い方を知りたい A1.製品付属のマニュアルをご確認下さい。 以下に動画ご案内もございます。ぜひご参照ください CHASING UNDERWATER DRONE – How to use CHASING WSRC Q2.「Custum」ボタンは任意でボタン設定が […]
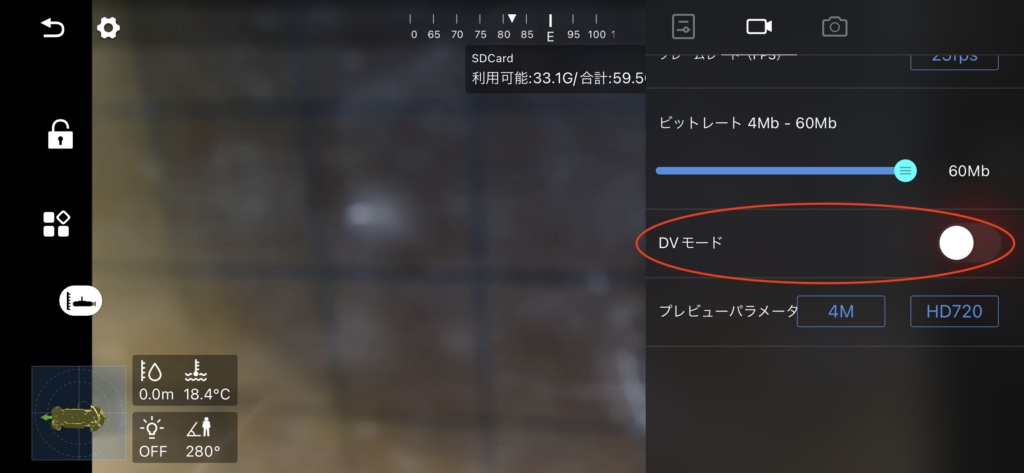
2022年12月現在、DVモードについては機能の実装はなくON/OFF切り替えていただいても撮影に影響はございません。 ※当記事の無断での複製、改編、転載、二次利用などは一切禁じます。 ※記載内容は公開時点での仕様に基づいています。バージョンアップなどにより記載内容と異なる場合が […]
ご相談の状況は液面計センサーもしくはフロート部分が原因で状況が発生している可能性があります。まずは、下記対策作業を実施ください。 1,液面計フロートの清掃作業 フロート部分にゴミ、汚れや散布後の清掃漏れや不足で状況が発生する場合があります。 まずは入念に水洗い(ぬるま湯洗い)でフ […]
現在、「v01.00.0509」のバージョンへのファームウェア更新時に、 極まれに前方カメラのエラーにより正常にアップデートが完了されない状況が確認されております。 該当する状況が発生した場合には、下記弊社までご一報を頂ければ、速やかに対応方法の ご案内を致しますのでお気軽にご相 […]
ログに以下のデータが見つかりました: [GetAvailableFunc] iDate: 1596520841 iCurDate: 1596520513 iEndDate:1596729600 [GetAvailableFunc] Local license out of dat […]
1. DJI Terraがインターネット接続することを妨害する他のソフトウェア(ウイルス、トロイの木馬、広告ウェアなど)がパソコンにインストールされていないか確認します。Windowsシステムのネットワークをリセットすることで解決できます。 2. VPNソフトウェアが有効化されて […]
1. ソフトウェアと関連付けされたパソコンに何らかのハードウェア変更が行われたかを確認します。ハードディスク構成変更またはCPU交換がされると以前に有効化された設定が無効化されます。 2. Alibaba クラウドやTencent クラウドなどのクラウドサーバーにハードウェア機器 […]
3Dモデルに関しては通常可能ですが、DJIドローンを使用した場合と比較して結果が劣る可能性があります。画像のGPSまたはRTKの測位データが、再構築の品質に有益な結果をもたらします。リアルタイムでの2Dモデル再構築には対応していません。 ※DJI社アフターサポート規 […]
理論上、空撮画像ではない画像で3Dモデルを作成できますが、品質が劣る可能性があります。空撮画像ではない画像で2Dモデルを作成することはできません。 ※DJI社アフターサポート規定に準拠致しております。DJI社及び弊社の判断により規約を変更させて頂く場合があります。 […]
はい。DJI Terraで生成された「.b3dm」/「.osgb」/「.ply」/「.obj」ファイルはユニバーサルファイル形式で、ウェブページに埋め込むことができます。これらの各フォーマットは、オンラインで埋め込む方法の手順について説明しているページを参照してください。 &nb […]
はい。DJI Terraで生成された「.objファイル」を、Maya/Blender/SketchUp/3ds Maxにインポートできます。各ソフトウェアでの具体的な手順については、チュートリアルをご確認ください。 ※DJI社アフターサポート規定に準拠致しております […]

はい。デフォルトのパスは、C:\Users\***(ユーザー名)\Documents\DJI\DJI Terraです。下記にアクセスし、パスを変更できます。 >> >> キャッシュ ディレクトリ ※DJI社アフターサポート規定に準拠致して […]












 カメラドローン
カメラドローン カメラ・スタビライザー
カメラ・スタビライザー  業務用ドローン・
業務用ドローン・ 水中ドローン(ROV)・
水中ドローン(ROV)・ RC・ロボット部品
RC・ロボット部品 講習会・イベント
講習会・イベント サポート・Q&A
サポート・Q&A ご案内
ご案内