 お問い合わせ
お問い合わせ お買い物ガイド
お買い物ガイド ドローンガイド
ドローンガイド







CHASING M2 / CHASING M2 PRO ロボットアームの取り付け位置・アーム開閉操作方法を知りたい
<1. 取り付け位置>
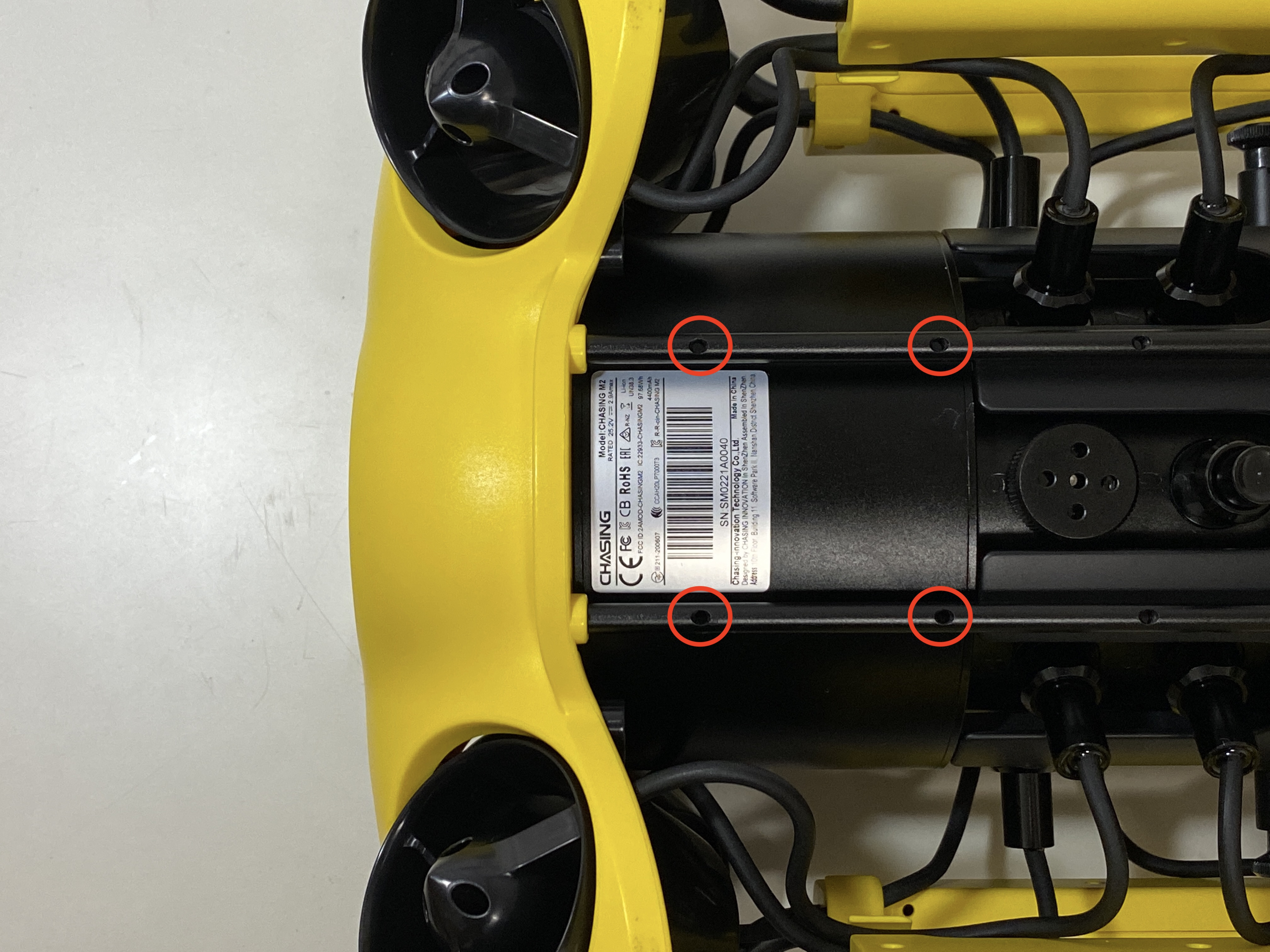
添付写真の位置に付属のネジにて取り付けを行います。
詳しくは付属のマニュアルをご参照ください。

<2. 操作方法 (コントローラーご利用時)>
専用ロボットアームについては、CHASING M2本体のバージョンにより操作方法が異なります。
下記をご参考ください。
<本体ファームウェアVer.1.9.8 以降 かつ CHANSHING GO1アプリVer.4.9.9以降 場合>
※Water Sampler も同等の手順での利用が可能です。
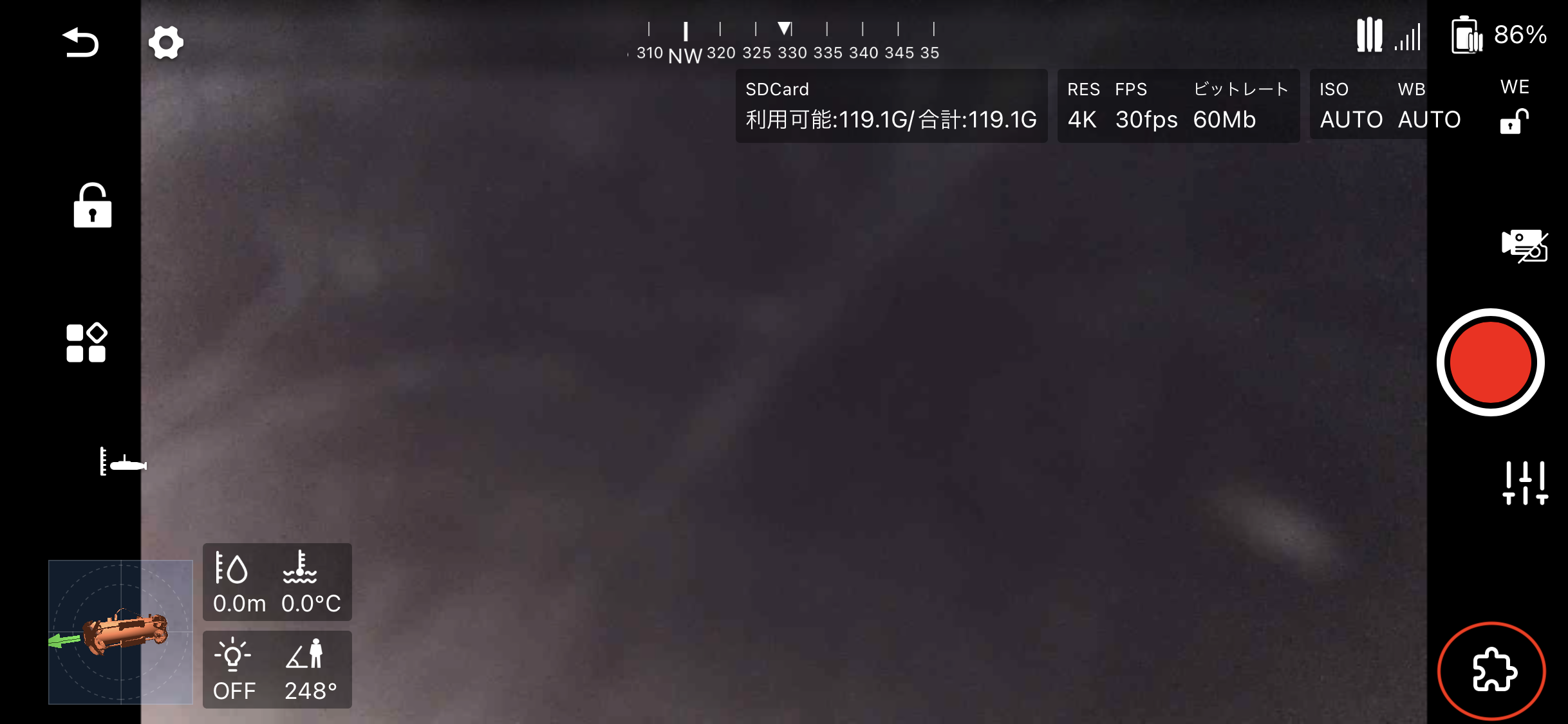
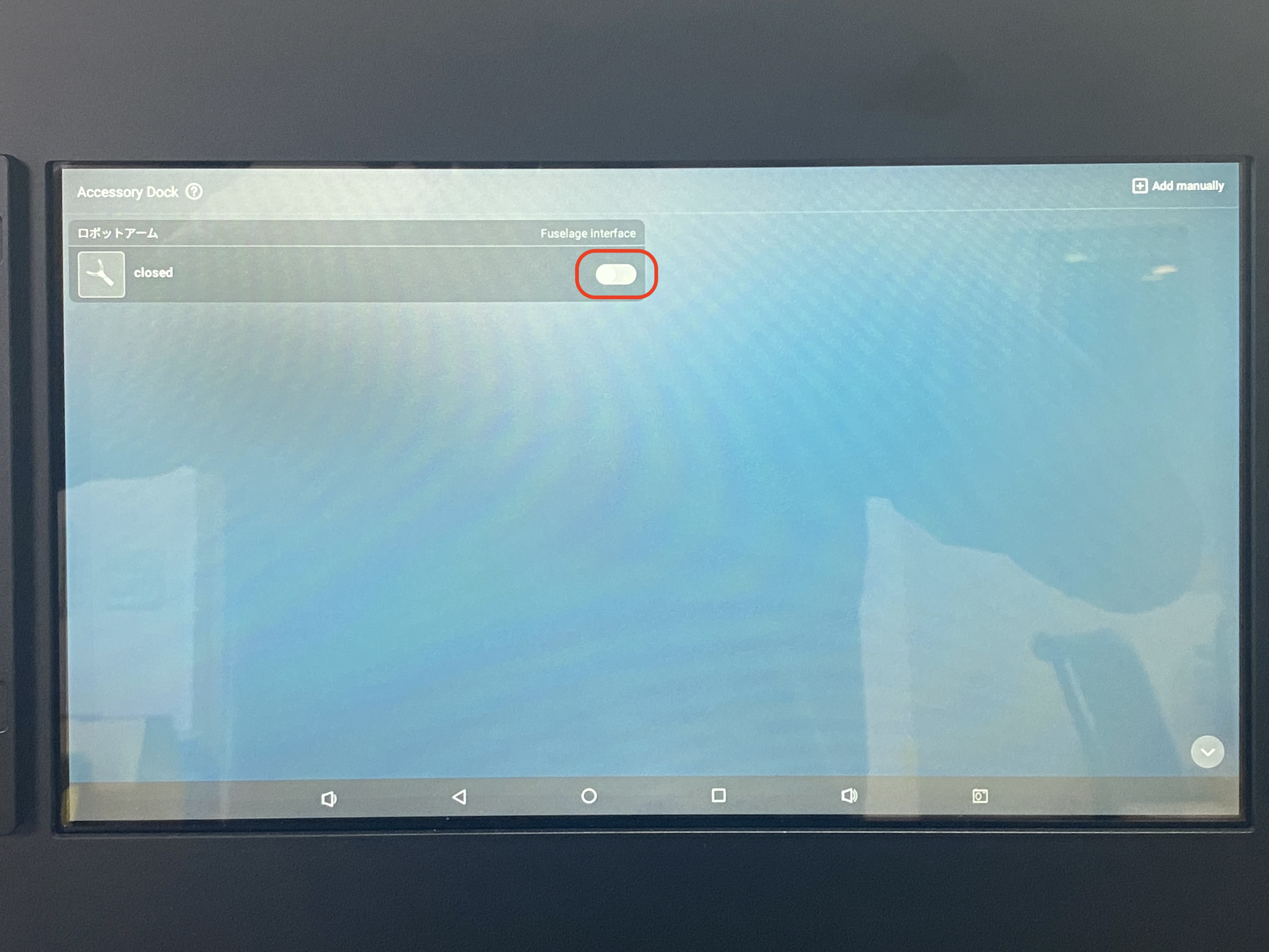
1.パイロット画面右下のパズマークをクリック。(1.-4.についてはロボットアームを取り付けた状態で起動した場合は、自動的に「Fuselage interface」がONになっている場合があります。)
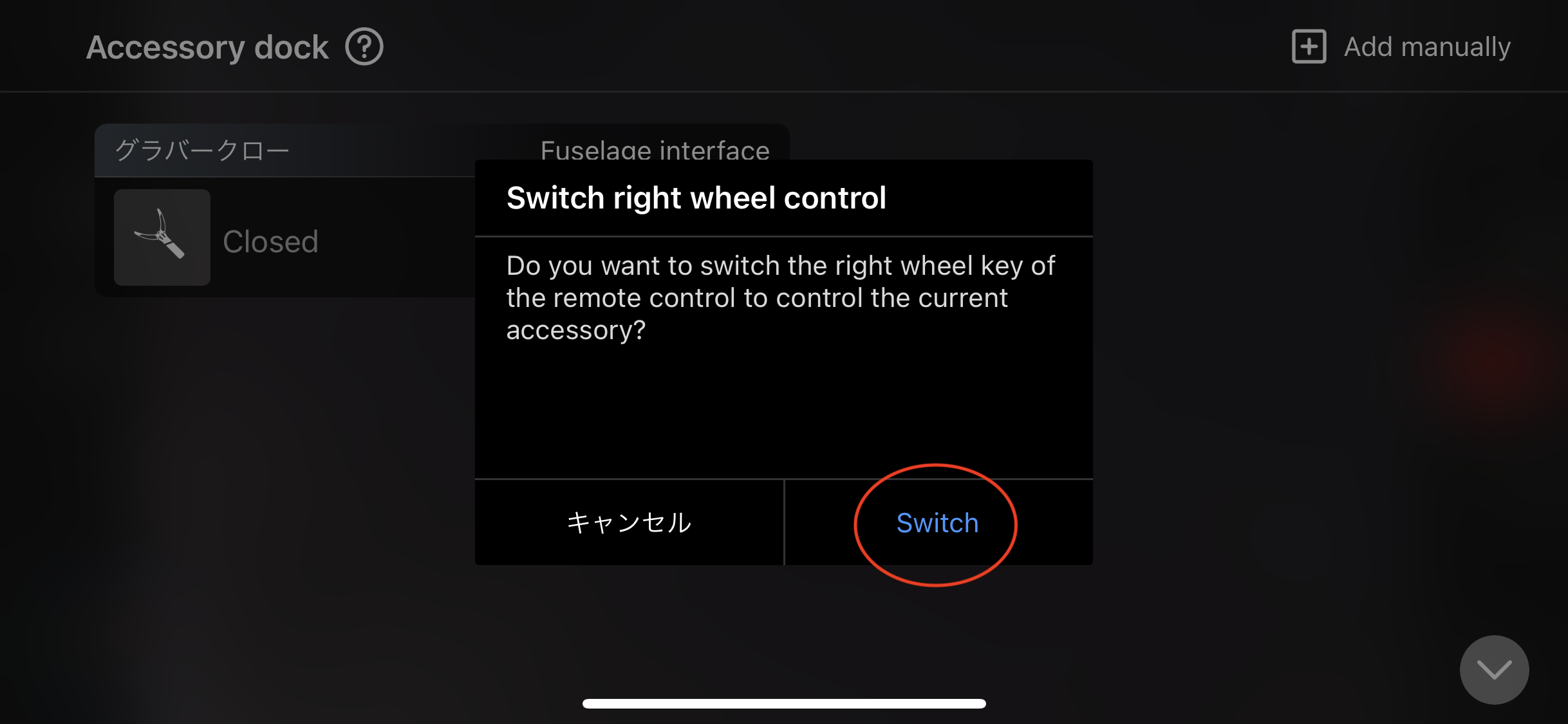
2.「Fuselage interface」のスイッチをクリック。
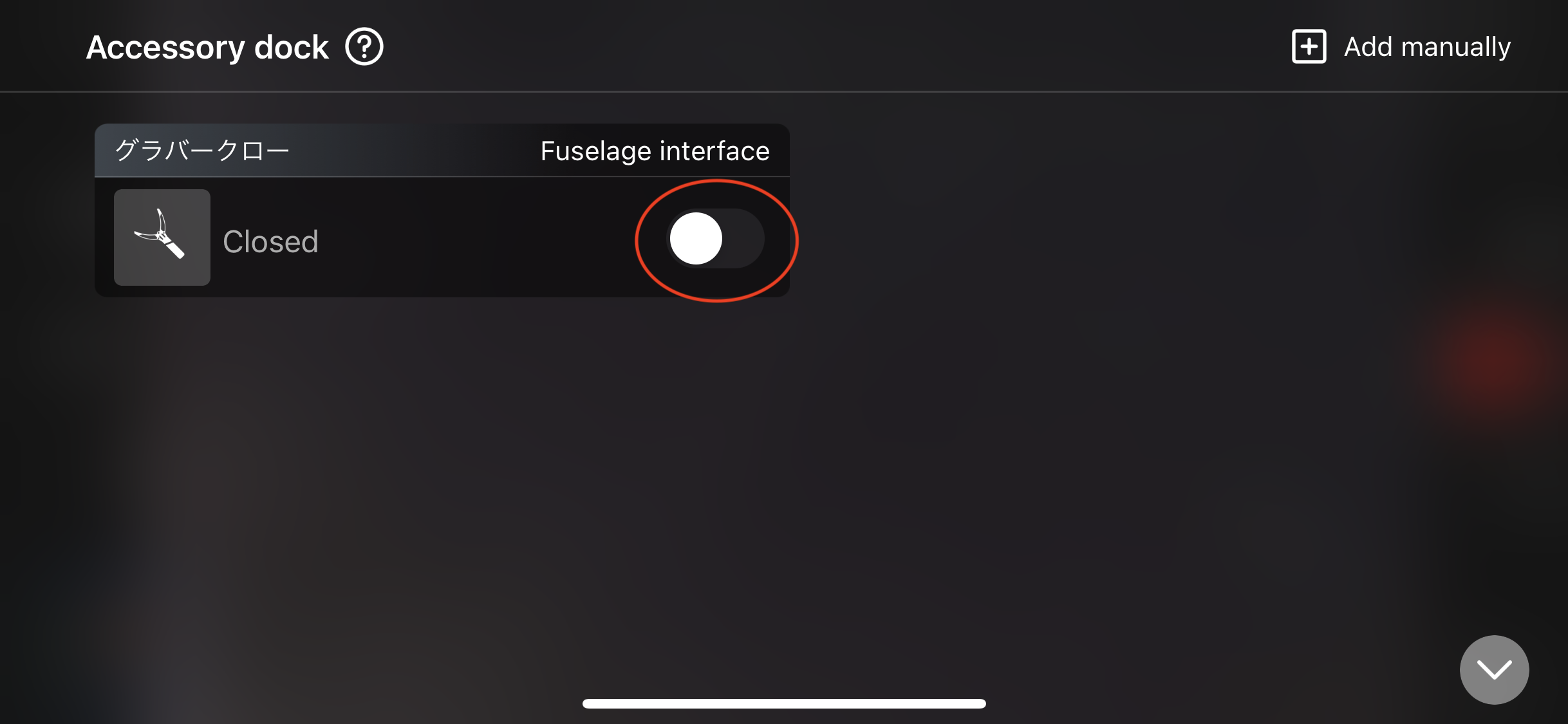
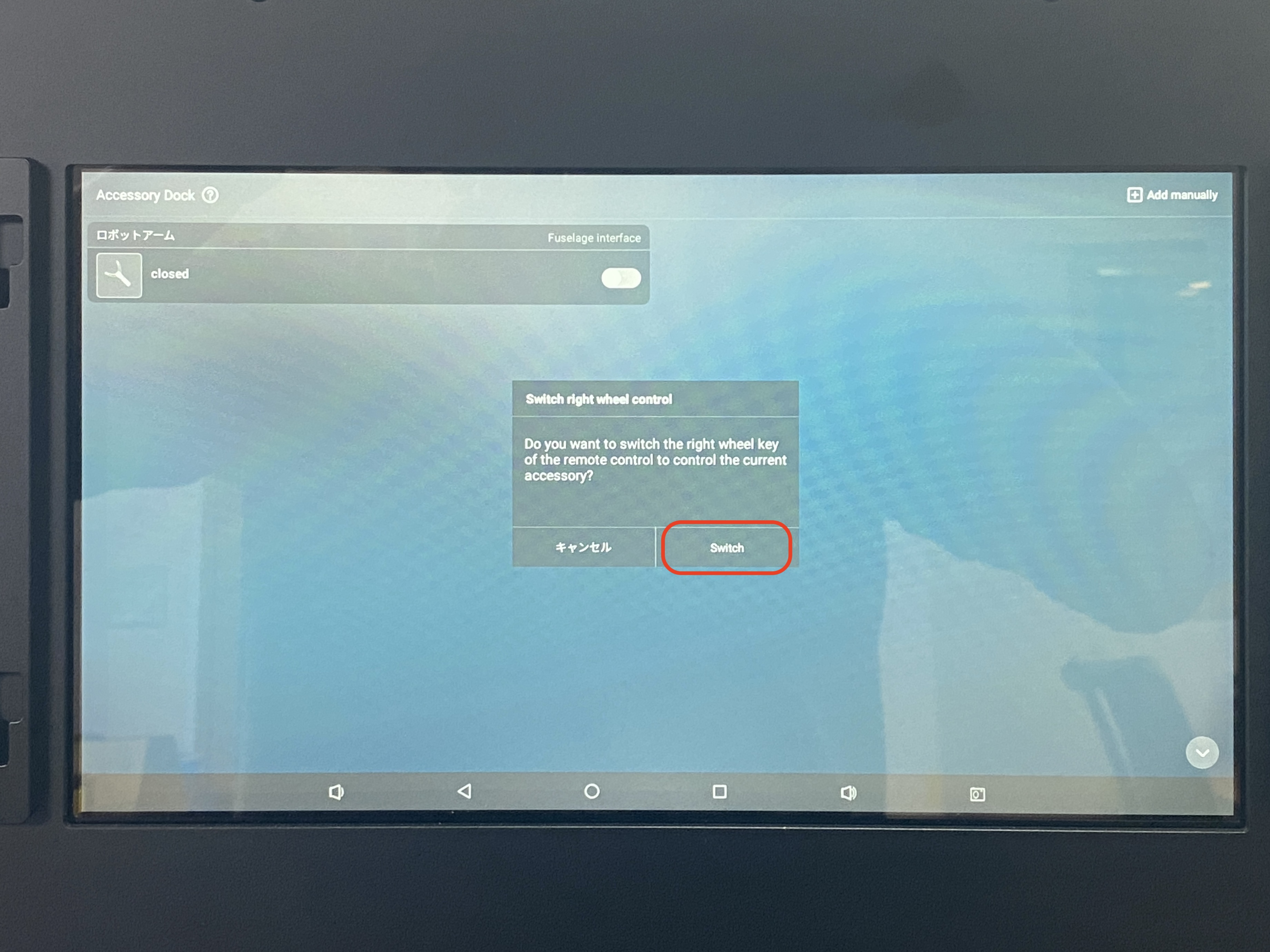
3.以下の案内が出るので「Switch」をクリック。
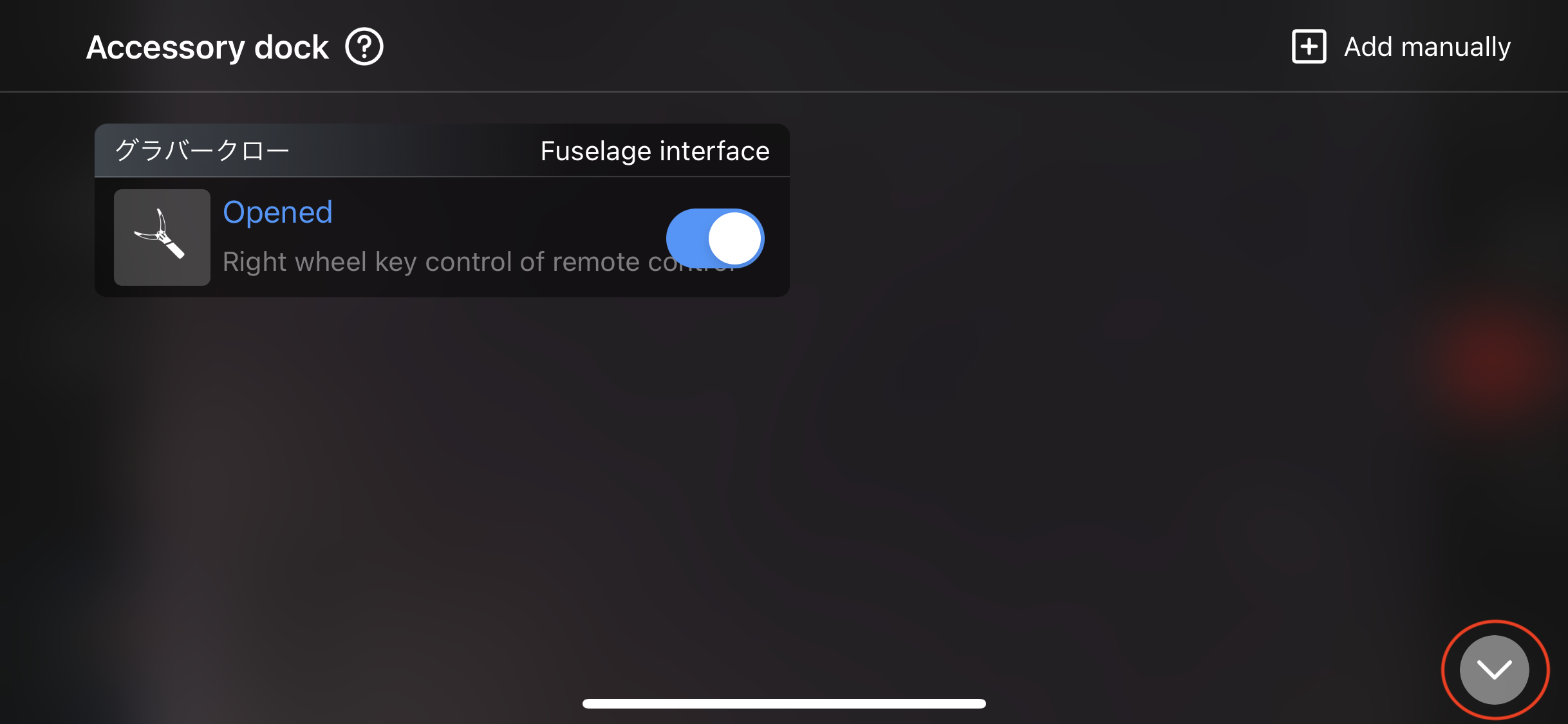
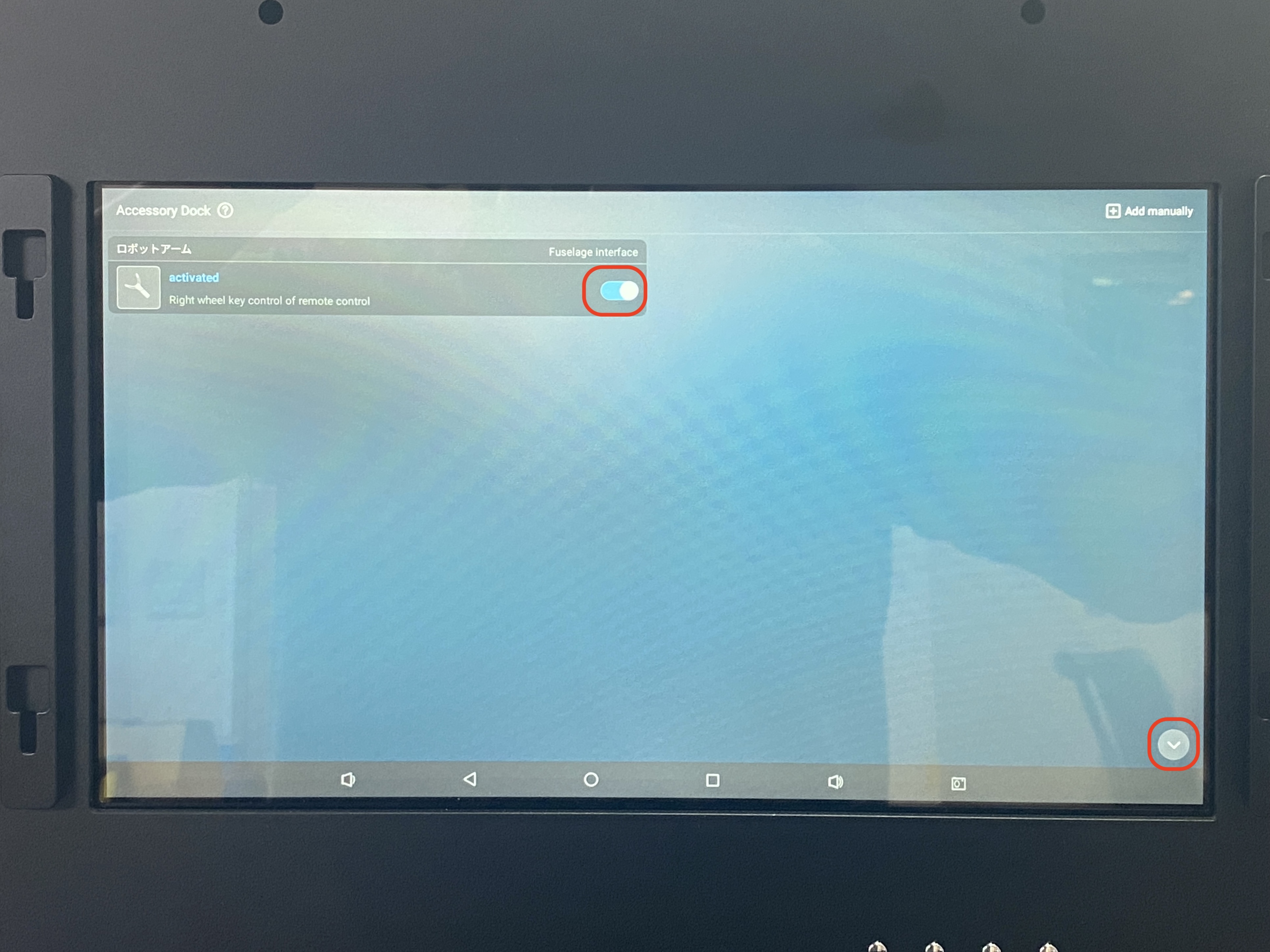
4.「Fuselage interface」がONになっていることを確認し、右下のアイコンをクリック。
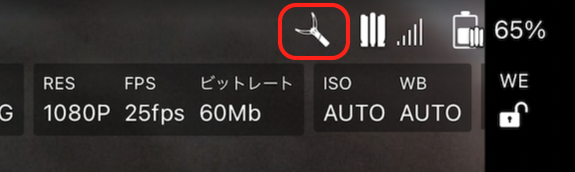
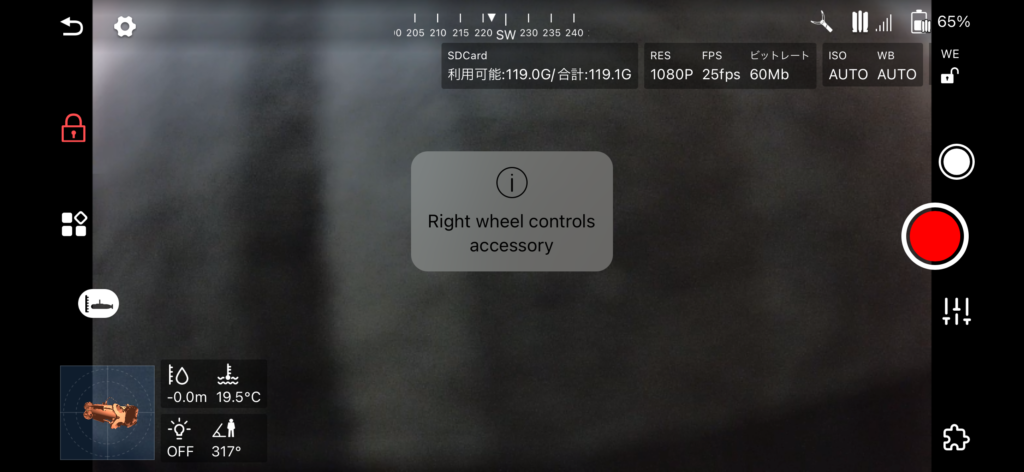
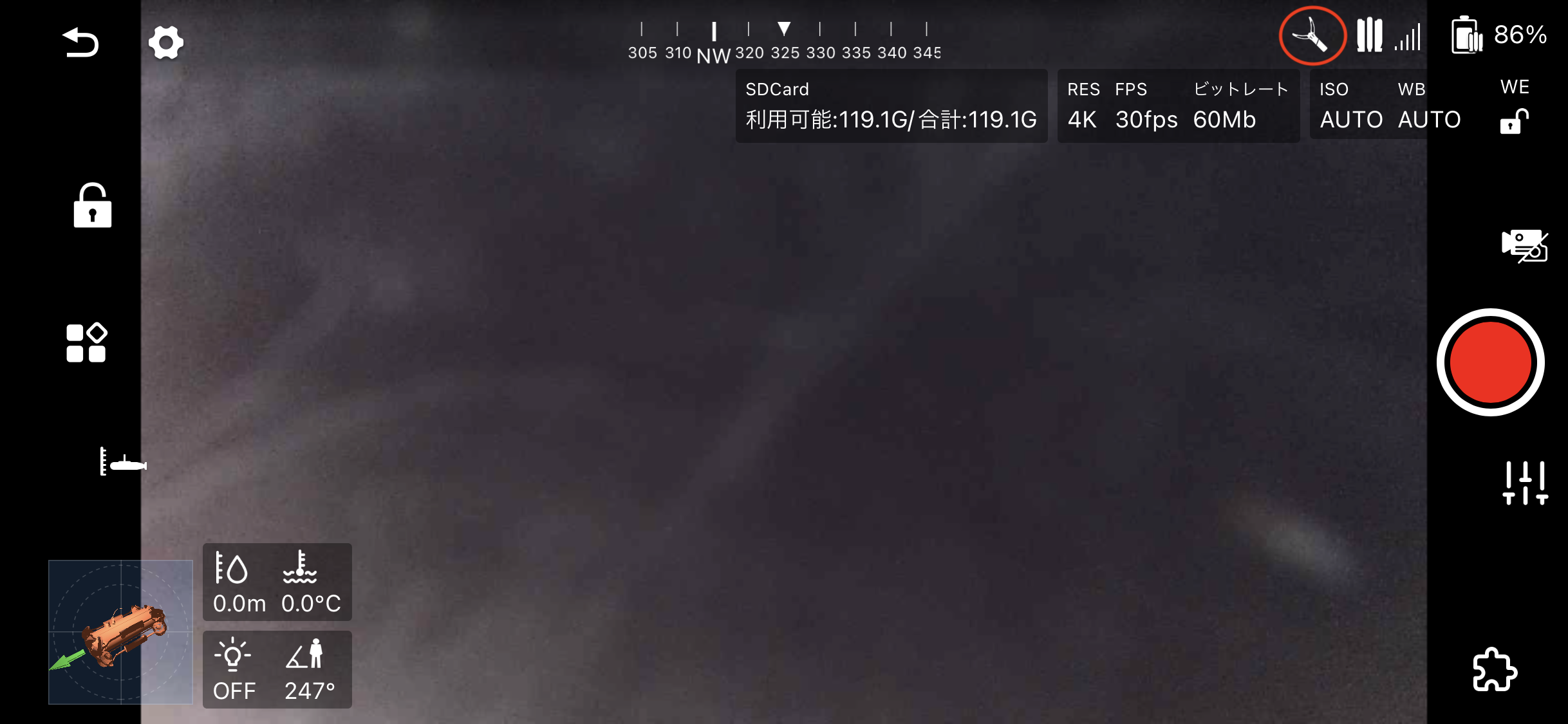
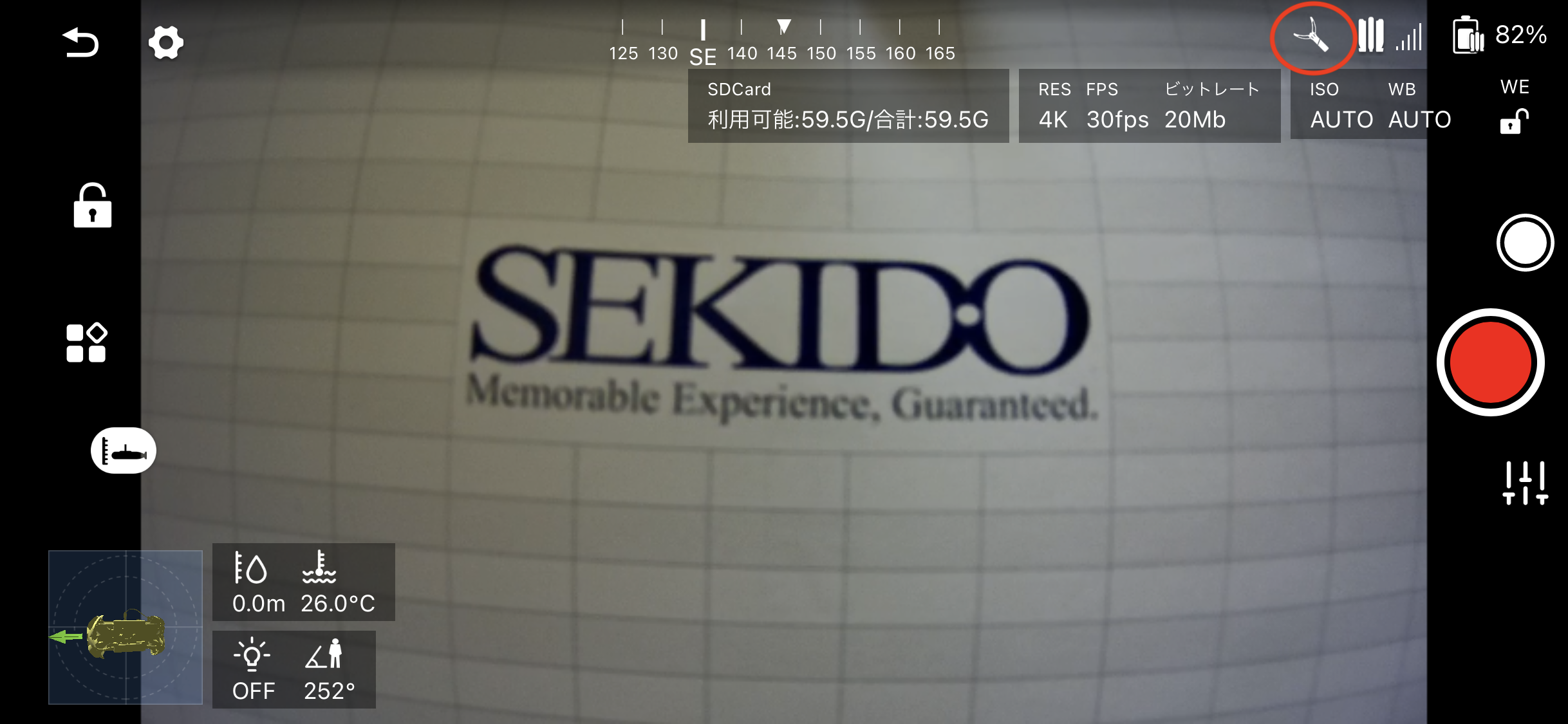
5.パイロット画面の右上にアームマークが表示されます。
6.送信機のアームボタンを1秒長押ししますと右ダイヤル操作でのアーム開閉可能となります。
7.送信機のアームボタンを1秒長押ししますと、右ダイヤル操作でのアーム開閉がオフミットされ、機体のロール操作が可能となります。
8.なお、送信機のアームボタンでも開閉が可能となり、アームボタンを押すとアームが開きます。もう一度アームボタンを押すとアームが閉じます。
<本体ファームウェアVer.1.6.6 以降 かつ CHANSHING GO1アプリVer.4.90.以降 場合>
1.パイロット画面右下のパズマークをクリック。
2.「Fuselage interface」のスイッチをクリック。
3.以下の案内が出るので「Switch」をクリック。
4.「Fuselage interface」がONになっていることを確認し、右下のアイコンをクリック。
5.パイロット画面に戻り、右上にアームマークが表示されます。「右ダイヤル操作」でアーム開閉操作が可能となります。
<本体ファームウェアVer.1.0.7.0 以降の場合>
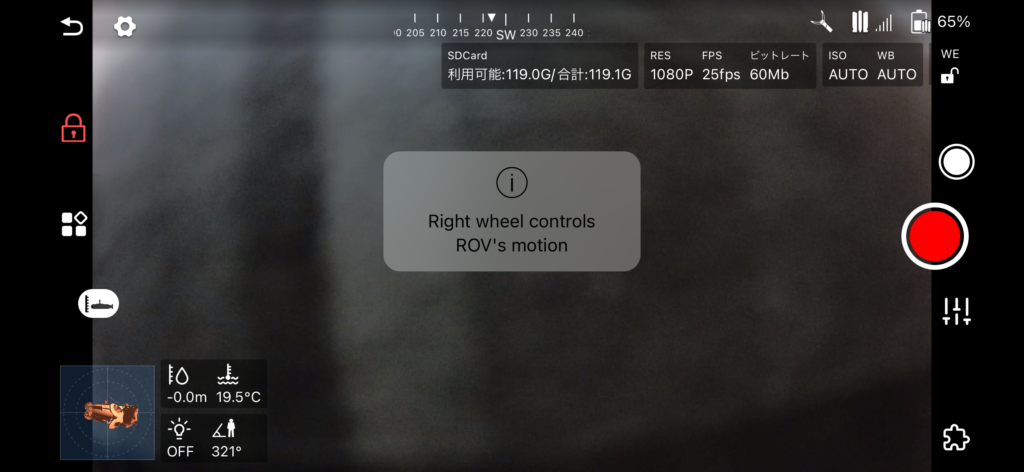
1.「送信機のアームボタン」を長押ししてアーム操作モードへ変更(※画像1参照)
2.「右ダイヤル操作」でアーム開閉操作
3.「送信機のアームボタン」を長押ししてアーム操作モードへ解除
※右ダイヤル操作は通常、機体のローリング制御となります。アーム操作モードを解除することで、ローリング制御へ戻るかたちになります。
※画像1
アーム操作モードをONにするとパイロット画面右上にアームのアイコンが表示されます。
<本体ファームウェアVer.1.0.6.0 以前の場合>
1.アームを開く際は送信機のアームボタンを1秒長押しします。
2.閉じる際は、開き切ったことを確認してから、アームボタンを1回短く押すと閉じます。
※閉じている間にアームボタンを1回短く押すと停止します。
<3. 操作方法 (高輝度スクリーンボックスご利用時)>
<本体ファームウェアVer.1.6.6 以降 かつ CHANSHING GO1アプリVer.4.9.0.6以降 場合>
1.パイロット画面右下のパズマークをクリック。
2.「Fuselage interface」のスイッチをクリック。
3.以下の案内が出るので「Switch」をクリック。
4.「Fuselage interface」がONになっていることを確認し、右下のアイコンをクリック。
5.右ダイヤル操作でアーム開閉ができます。

<CHASING GO1ファームウェアVer.4.9.0.6未満の場合>
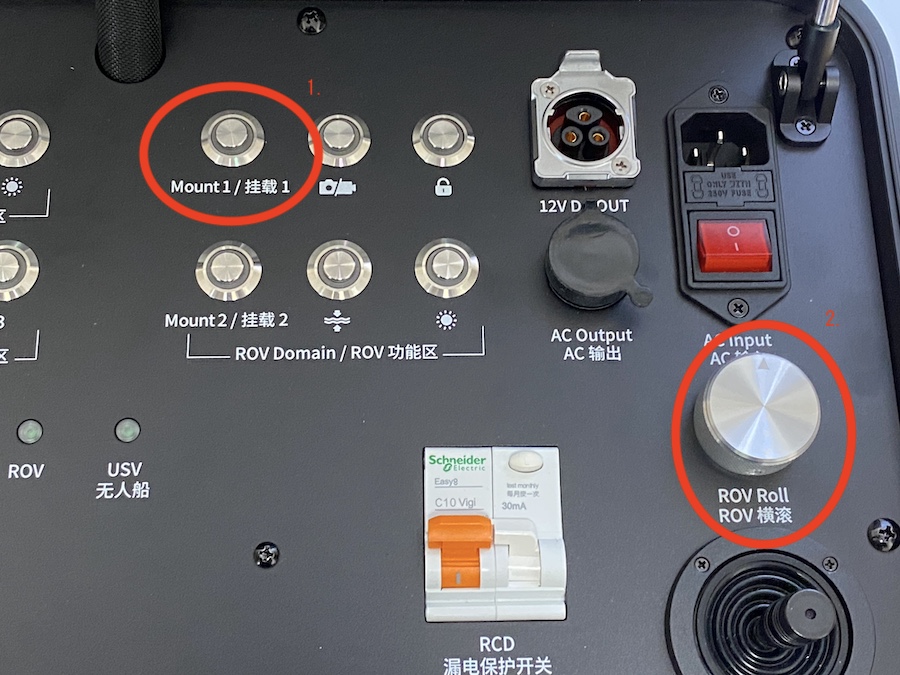
1.「Mount 1」を押してアーム操作モードへ変更
2.「ROV Roll」でアーム開閉操作
3.「Mount 1」を長押ししてアーム操作モードへ解除
※右ダイヤル操作は通常、機体のローリング制御となります。アーム操作モードを解除することで、ローリング制御へ戻るかたちになります。
※当記事の無断での複製、改編、転載、二次利用などは一切禁じます。
※記載内容は公開時点での仕様に基づいています。バージョンアップなどにより記載内容と異なる場合があります。
※記載事項は予告なく変更となる場合があります。
 DJI
DJI PGYTECH
PGYTECH HOBBYWING
HOBBYWING- AERO-D外付型リモートID
 CHASING
CHASING QYSEA
QYSEA SUBLUE
SUBLUE WAYDOO
WAYDOO- Unitreeユニツリー
 FJDynamics
FJDynamics SAVOX
SAVOX SUNPADOW
SUNPADOW- Firmware Updateファームウェア
- OTHERSその他









 カメラドローン
カメラドローン カメラ・スタビライザー
カメラ・スタビライザー  業務用ドローン・
業務用ドローン・ 水中ドローン(ROV)・
水中ドローン(ROV)・ RC・ロボット部品
RC・ロボット部品 講習会・イベント
講習会・イベント サポート・Q&A
サポート・Q&A ご案内
ご案内